正在加载图片...
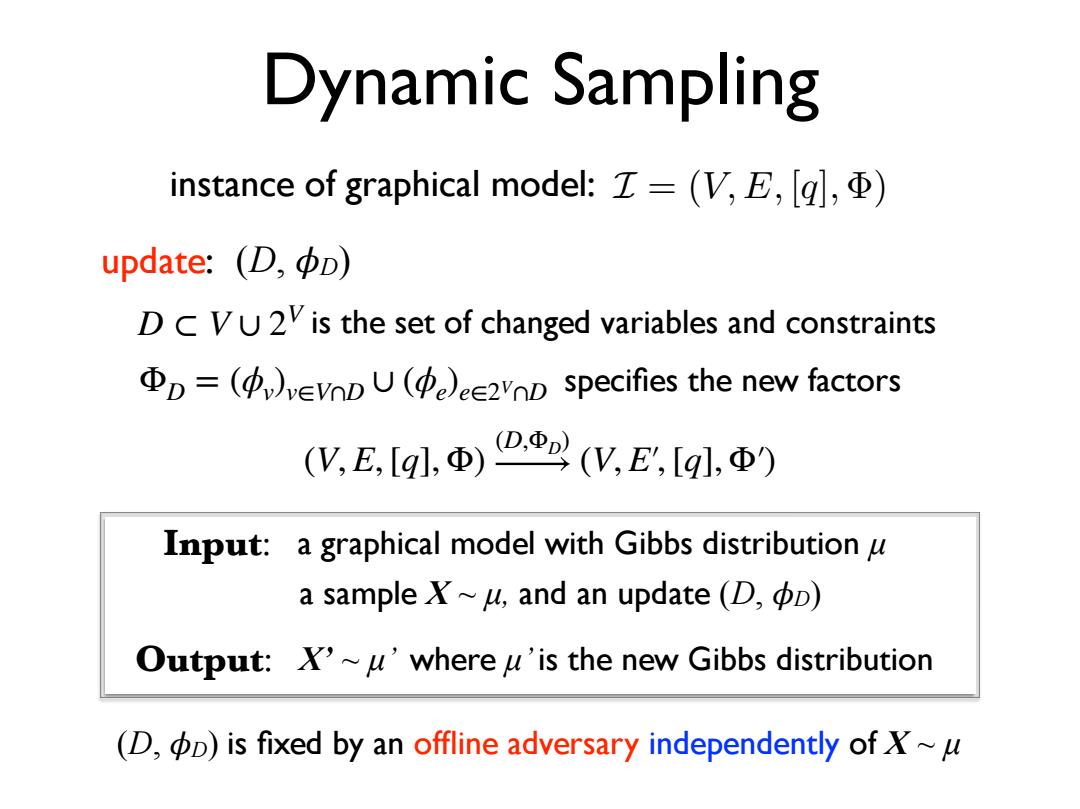
Dynamic Sampling instance of graphical model:Z =(V,E,g,) update:(D,D) DC VU2V is the set of changed variables and constraints D=()vEVD U(e)eE2vD specifies the new factors (V,E,Iql,)VEIql) Input:a graphical model with Gibbs distribution a sample ~u,and an update (D,D) Output:X'~u'where u'is the new Gibbs distribution (D,p)is fixed by an offline adversary independently of X~uDynamic Sampling Input: Output: a graphical model with Gibbs distribution µ a sample X ~ µ, and an update (D, �D) X’ ~ µ’ where µ’ is the new Gibbs distribution instance of graphical model: I = (V,E, [q], ) update: (D, �D) (V, E, [q], Φ) (D,ΦD) (V, E′ , [q], Φ′) is the set of changed variables and constraints ΦD = (ϕv)v∈V∩D ∪ (ϕe)e∈2V∩D specifies the new factors D ⊂ V ∪ 2V (D, �D) is fixed by an offline adversary independently of X ~ µ