正在加载图片...
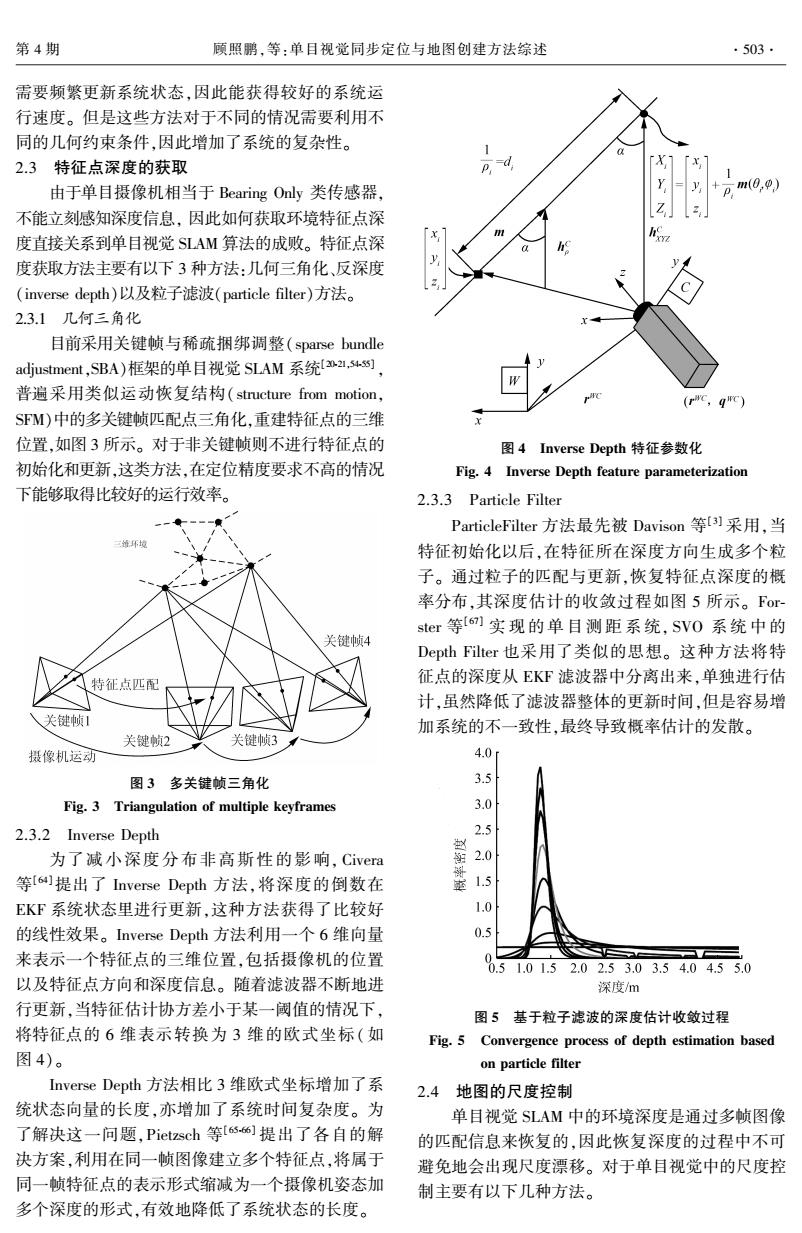
第4期 顾照鹏,等:单目视觉同步定位与地图创建方法综述 ·503. 需要频繁更新系统状态,因此能获得较好的系统运 行速度。但是这些方法对于不同的情况需要利用不 同的几何约束条件,因此增加了系统的复杂性。 2.3特征点深度的获取 P. d 「X1 「x 1 由于单目摄像机相当于Bearing Only类传感器, y+pm0,) 不能立刻感知深度信息,因此如何获取环境特征点深 Z 加 度直接关系到单目视觉SLAM算法的成败。特征点深 h 度获取方法主要有以下3种方法:几何三角化、反深度 y (inverse depth)以及粒子滤波(particle filter)方法。 2.3.1几何三角化 目前采用关键帧与稀疏捆绑调整(sparse bundle adjustment,SBA)框架的单目视觉SLAM系统[.21,.s] 普遍采用类似运动恢复结构(structure from motion, (rc,gc) SM)中的多关键帧匹配,点三角化,重建特征,点的三维 位置,如图3所示。对于非关键帧则不进行特征点的 图4 inverse Depth特征参数化 初始化和更新,这类方法,在定位精度要求不高的情况 Fig.4 Inverse Depth feature parameterization 下能够取得比较好的运行效率。 2.3.3 Particle Filter ParticleFilter方法最先被Davison等f]采用,当 环境 特征初始化以后,在特征所在深度方向生成多个粒 子。通过粒子的匹配与更新,恢复特征点深度的概 率分布,其深度估计的收敛过程如图5所示。For ster等6)实现的单目测距系统,SV0系统中的 关键帧4 Depth Filter也采用了类似的思想。这种方法将特 特征点匹配 征点的深度从EKF滤波器中分离出来,单独进行估 计,虽然降低了滤波器整体的更新时间,但是容易增 关键帧] 加系统的不一致性,最终导致概率估计的发散。 关键帧2 关键帧3 摄像机运动 4.0 图3多关键帧三角化 3.5 Fig.3 Triangulation of multiple keyframes 3.0 2.3.2 Inverse Depth 2.5 为了减小深度分布非高斯性的影响,Civera 2.0 等[a]提出了Inverse Dept山方法,将深度的倒数在 1.5 EKF系统状态里进行更新,这种方法获得了比较好 .0 的线性效果。Inverse Depth方法利用一个6维向量 0.5 来表示一个特征点的三维位置,包括摄像机的位置 0 0.51.01.52.02.53.03.54.04.55.0 以及特征点方向和深度信息。随着滤波器不断地进 深度m 行更新,当特征估计协方差小于某一阈值的情况下, 图5基于粒子滤波的深度估计收敛过程 将特征点的6维表示转换为3维的欧式坐标(如 Fig.5 Convergence process of depth estimation based 图4)。 on particle filter Inverse Depth方法相比3维欧式坐标增加了系 2.4地图的尺度控制 统状态向量的长度,亦增加了系统时间复杂度。为 单目视觉SLAM中的环境深度是通过多帧图像 了解决这一问题,Pietzsch等[s]提出了各自的解 的匹配信息来恢复的,因此恢复深度的过程中不可 决方案,利用在同一帧图像建立多个特征点,将属于 避免地会出现尺度漂移。对于单目视觉中的尺度控 同一帧特征点的表示形式缩减为一个摄像机姿态加 制主要有以下几种方法。 多个深度的形式,有效地降低了系统状态的长度。需要频繁更新系统状态,因此能获得较好的系统运 行速度。 但是这些方法对于不同的情况需要利用不 同的几何约束条件,因此增加了系统的复杂性。 2.3 特征点深度的获取 由于单目摄像机相当于 Bearing Only 类传感器, 不能立刻感知深度信息, 因此如何获取环境特征点深 度直接关系到单目视觉 SLAM 算法的成败。 特征点深 度获取方法主要有以下 3 种方法:几何三角化、反深度 (inverse depth)以及粒子滤波(particle filter)方法。 2.3.1 几何三角化 目前采用关键帧与稀疏捆绑调整(sparse bundle adjustment,SBA)框架的单目视觉 SLAM 系统[20⁃21,54⁃55] , 普遍采用类似运动恢复结构(structure from motion, SFM)中的多关键帧匹配点三角化,重建特征点的三维 位置,如图 3 所示。 对于非关键帧则不进行特征点的 初始化和更新,这类方法,在定位精度要求不高的情况 下能够取得比较好的运行效率。 图 3 多关键帧三角化 Fig. 3 Triangulation of multiple keyframes 2.3.2 Inverse Depth 为了减小深度分布非高斯性的影响, Civera 等[64]提出了 Inverse Depth 方法,将深度的倒数在 EKF 系统状态里进行更新,这种方法获得了比较好 的线性效果。 Inverse Depth 方法利用一个 6 维向量 来表示一个特征点的三维位置,包括摄像机的位置 以及特征点方向和深度信息。 随着滤波器不断地进 行更新,当特征估计协方差小于某一阈值的情况下, 将特征点的 6 维表示转换为 3 维的欧式坐标(如 图 4)。 Inverse Depth 方法相比 3 维欧式坐标增加了系 统状态向量的长度,亦增加了系统时间复杂度。 为 了解决这一问题,Pietzsch 等[65⁃66] 提出了各自的解 决方案,利用在同一帧图像建立多个特征点,将属于 同一帧特征点的表示形式缩减为一个摄像机姿态加 多个深度的形式,有效地降低了系统状态的长度。 图 4 Inverse Depth 特征参数化 Fig. 4 Inverse Depth feature parameterization 2.3.3 Particle Filter ParticleFilter 方法最先被 Davison 等[3] 采用,当 特征初始化以后,在特征所在深度方向生成多个粒 子。 通过粒子的匹配与更新,恢复特征点深度的概 率分布,其深度估计的收敛过程如图 5 所示。 For⁃ ster 等[67] 实 现 的 单 目 测 距 系 统, SVO 系 统 中 的 Depth Filter 也采用了类似的思想。 这种方法将特 征点的深度从 EKF 滤波器中分离出来,单独进行估 计,虽然降低了滤波器整体的更新时间,但是容易增 加系统的不一致性,最终导致概率估计的发散。 图 5 基于粒子滤波的深度估计收敛过程 Fig. 5 Convergence process of depth estimation based on particle filter 2.4 地图的尺度控制 单目视觉 SLAM 中的环境深度是通过多帧图像 的匹配信息来恢复的,因此恢复深度的过程中不可 避免地会出现尺度漂移。 对于单目视觉中的尺度控 制主要有以下几种方法。 第 4 期 顾照鹏,等:单目视觉同步定位与地图创建方法综述 ·503·