正在加载图片...
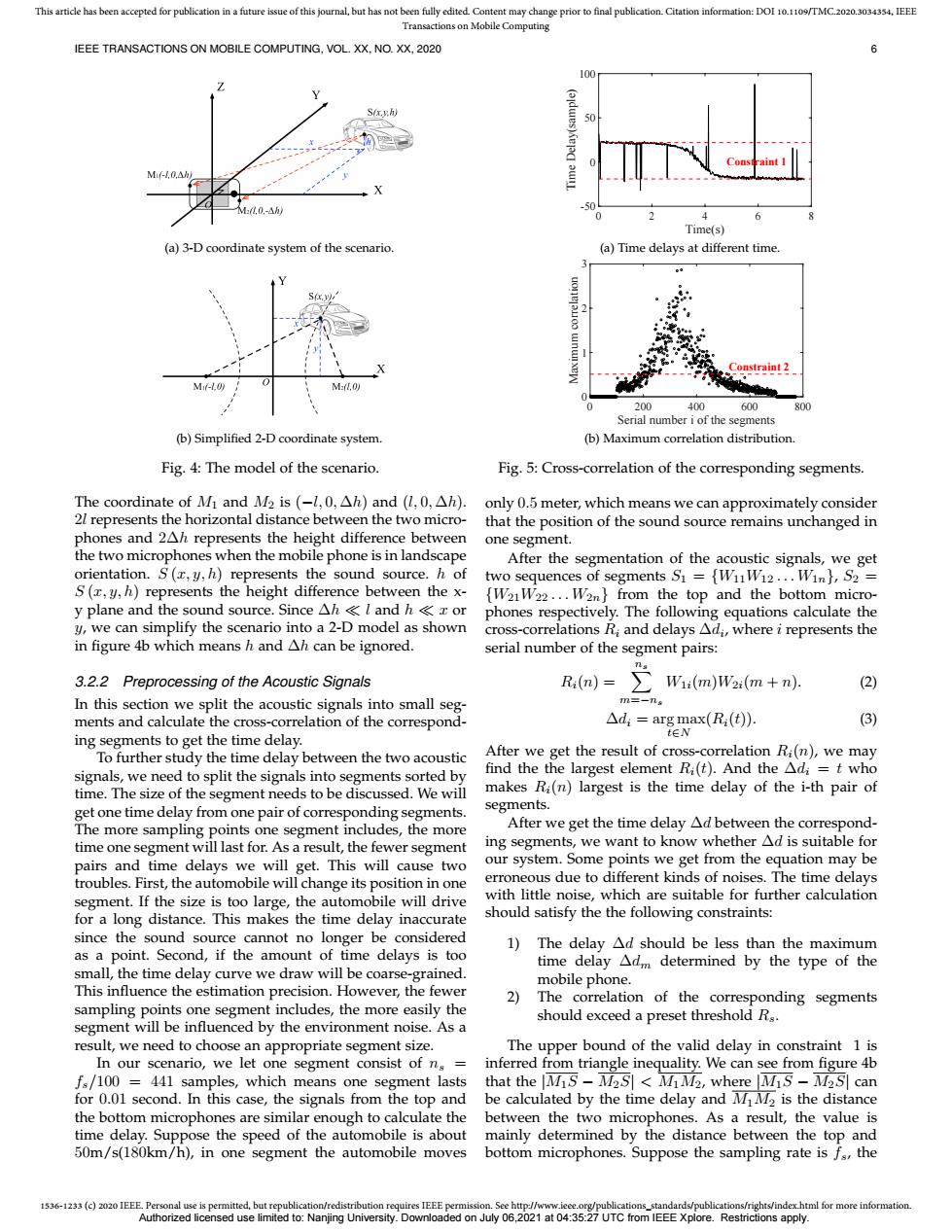
This article has been accepted for publication in a future issue of this journal,but has not been fully edited.Content may change prior to final publication.Citation information:DOI 10.1109/TMC.2020.3034354.IEEE Transactions on Mobile Computing IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2020 100 --6 Mf-4.0,△h M.0.-4h 4 Time(s) (a)3-D coordinate system of the scenario (a)Time delays at different time Constraint 2 M-, M:,0) 200 400 600 800 Serial number i of the segments (b)Simplified 2-D coordinate system (b)Maximum correlation distribution Fig.4:The model of the scenario. Fig.5:Cross-correlation of the corresponding segments. The coordinate of Mi and M2 is(-1,0,Ah)and (1,0,Ah). only 0.5 meter,which means we can approximately consider 2l represents the horizontal distance between the two micro- that the position of the sound source remains unchanged in phones and 2Ah represents the height difference between one segment. the two microphones when the mobile phone is in landscape After the segmentation of the acoustic signals,we get orientation.S(r,y,h)represents the sound source.h of two sequences of segments S1 {Wi1W12...Win},S2 S(z,y,h)represents the height difference between the x- {W21W22...W2n}from the top and the bottom micro- y plane and the sound source.Since Ah<l and hz or phones respectively.The following equations calculate the y,we can simplify the scenario into a 2-D model as shown cross-correlations Ri and delays Adi,where i represents the in figure 4b which means h and Ah can be ignored. serial number of the segment pairs: 3.2.2 Preprocessing of the Acoustic Signals B.(n)Wa(m)War(m +n). (2) In this section we split the acoustic signals into small seg- m=-ns ments and calculate the cross-correlation of the correspond- △d=arg max(R:(t): (3) ing segments to get the time delay. To further study the time delay between the two acoustic After we get the result of cross-correlation Ri(n),we may signals,we need to split the signals into segments sorted by find the the largest element Ri(t).And the Adi =t who time.The size of the segment needs to be discussed.We will makes Ri(n)largest is the time delay of the i-th pair of get one time delay from one pair of corresponding segments. segments. The more sampling points one segment includes,the more After we get the time delay Ad between the correspond- time one segment will last for.As a result,the fewer segment ing segments,we want to know whether Ad is suitable for pairs and time delays we will get.This will cause two our system.Some points we get from the equation may be troubles.First,the automobile will change its position in one erroneous due to different kinds of noises.The time delays segment.If the size is too large,the automobile will drive with little noise,which are suitable for further calculation for a long distance.This makes the time delay inaccurate should satisfy thethe following constraints: since the sound source cannot no longer be considered 1)The delay Ad should be less than the maximum as a point.Second,if the amount of time delays is too time delay Adm determined by the type of the small,the time delay curve we draw will be coarse-grained. This influence the estimation precision.However,the fewer mobile phone. 2) The correlation of the corresponding segments sampling points one segment includes,the more easily the should exceed a preset threshold R. segment will be influenced by the environment noise.As a result,we need to choose an appropriate segment size. The upper bound of the valid delay in constraint 1 is In our scenario,we let one segment consist of ns inferred from triangle inequality.We can see from figure 4b fs/100 =441 samples,which means one segment lasts that the M1S-M2S<MM2,where M1S-M2S]can for 0.01 second.In this case,the signals from the top and be calculated by the time delay and MM2 is the distance the bottom microphones are similar enough to calculate the between the two microphones.As a result,the value is time delay.Suppose the speed of the automobile is about mainly determined by the distance between the top and 50m/s(180km/h),in one segment the automobile moves bottom microphones.Suppose the sampling rate is fs,the 36-1233(c)2020 IEEE Personal use is permitted,but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. Authorized licensed use limited to:Nanjing University.Downloaded on July 06,2021 at 04:35:27 UTC from IEEE Xplore.Restrictions apply.1536-1233 (c) 2020 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMC.2020.3034354, IEEE Transactions on Mobile Computing IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2020 6 (a) 3-D coordinate system of the scenario. (b) Simplified 2-D coordinate system. Fig. 4: The model of the scenario. The coordinate of M1 and M2 is (−l, 0, ∆h) and (l, 0, ∆h). 2l represents the horizontal distance between the two microphones and 2∆h represents the height difference between the two microphones when the mobile phone is in landscape orientation. S (x, y, h) represents the sound source. h of S (x, y, h) represents the height difference between the xy plane and the sound source. Since ∆h
l and h
x or y, we can simplify the scenario into a 2-D model as shown in figure 4b which means h and ∆h can be ignored. 3.2.2 Preprocessing of the Acoustic Signals In this section we split the acoustic signals into small segments and calculate the cross-correlation of the corresponding segments to get the time delay. To further study the time delay between the two acoustic signals, we need to split the signals into segments sorted by time. The size of the segment needs to be discussed. We will get one time delay from one pair of corresponding segments. The more sampling points one segment includes, the more time one segment will last for. As a result, the fewer segment pairs and time delays we will get. This will cause two troubles. First, the automobile will change its position in one segment. If the size is too large, the automobile will drive for a long distance. This makes the time delay inaccurate since the sound source cannot no longer be considered as a point. Second, if the amount of time delays is too small, the time delay curve we draw will be coarse-grained. This influence the estimation precision. However, the fewer sampling points one segment includes, the more easily the segment will be influenced by the environment noise. As a result, we need to choose an appropriate segment size. In our scenario, we let one segment consist of ns = fs/100 = 441 samples, which means one segment lasts for 0.01 second. In this case, the signals from the top and the bottom microphones are similar enough to calculate the time delay. Suppose the speed of the automobile is about 50m/s(180km/h), in one segment the automobile moves 02468 Time(s) -50 0 50 100 Time Delay(sample) Constraint 1 (a) Time delays at different time. 0 200 400 600 800 Serial number i of the segments 0 1 2 3 Maximum correlation Constraint 2 (b) Maximum correlation distribution. Fig. 5: Cross-correlation of the corresponding segments. only 0.5 meter, which means we can approximately consider that the position of the sound source remains unchanged in one segment. After the segmentation of the acoustic signals, we get two sequences of segments S1 = {W11W12 . . . W1n}, S2 = {W21W22 . . . W2n} from the top and the bottom microphones respectively. The following equations calculate the cross-correlations Ri and delays ∆di , where i represents the serial number of the segment pairs: Ri(n) = Xns m=−ns W1i(m)W2i(m + n). (2) ∆di = arg max t∈N (Ri(t)). (3) After we get the result of cross-correlation Ri(n), we may find the the largest element Ri(t). And the ∆di = t who makes Ri(n) largest is the time delay of the i-th pair of segments. After we get the time delay ∆d between the corresponding segments, we want to know whether ∆d is suitable for our system. Some points we get from the equation may be erroneous due to different kinds of noises. The time delays with little noise, which are suitable for further calculation should satisfy the the following constraints: 1) The delay ∆d should be less than the maximum time delay ∆dm determined by the type of the mobile phone. 2) The correlation of the corresponding segments should exceed a preset threshold Rs. The upper bound of the valid delay in constraint 1 is inferred from triangle inequality. We can see from figure 4b that the |M1S − M2S| < M1M2, where |M1S − M2S| can be calculated by the time delay and M1M2 is the distance between the two microphones. As a result, the value is mainly determined by the distance between the top and bottom microphones. Suppose the sampling rate is fs, the Authorized licensed use limited to: Nanjing University. Downloaded on July 06,2021 at 04:35:27 UTC from IEEE Xplore. Restrictions apply