正在加载图片...
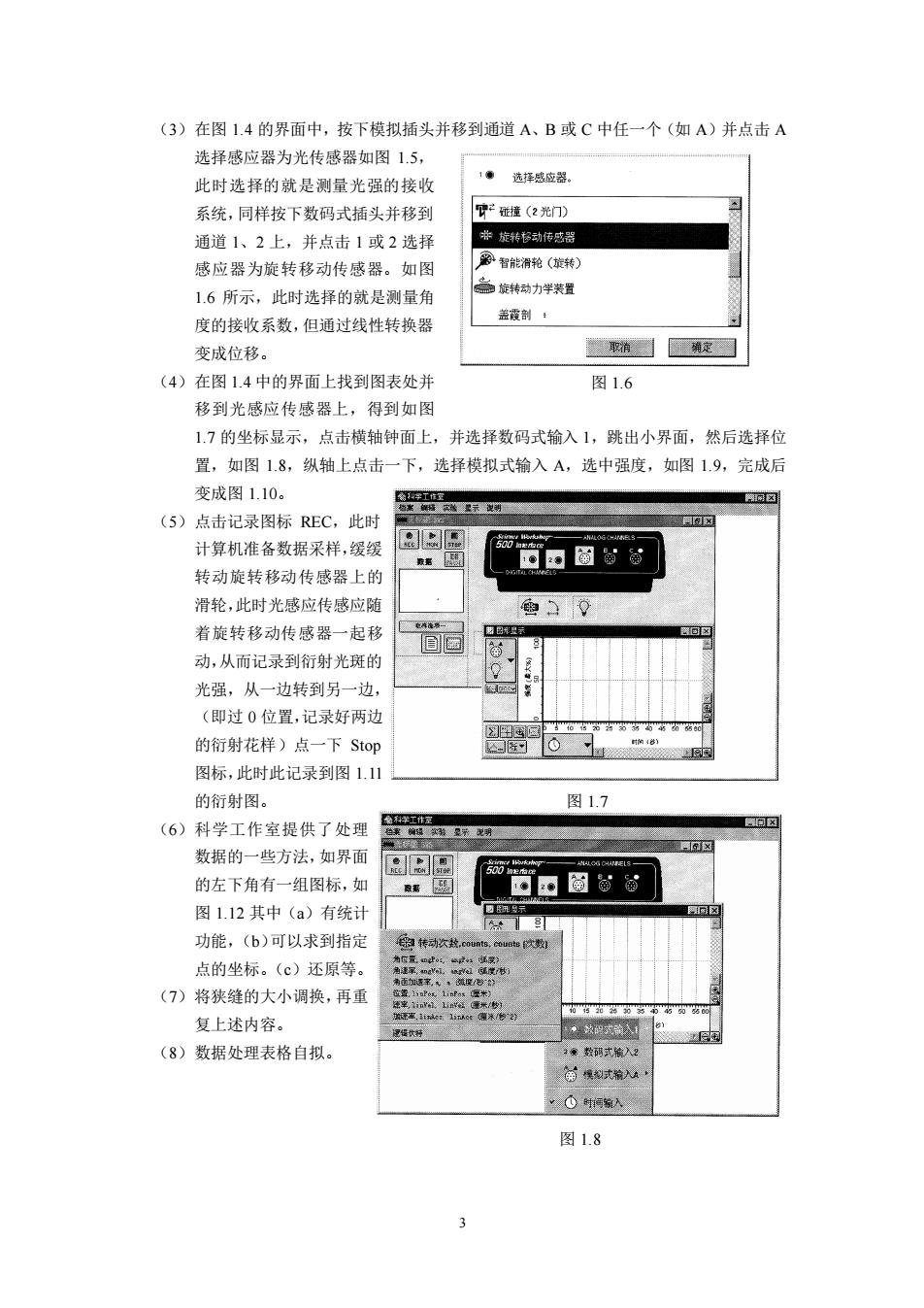
(3)在图1.4的界面中,按下模拟插头并移到通道A、B或C中任一个(如A)并点击A 选择感应器为光传感器如图1.5, 此时选择的就是测量光强的接收 选择感应器 系统,同样按下数码式插头并移到 产碰撞(2光门) 通道1、2上,并点击1或2选择 #症转移动传感器 感应器为旋转移动传感器。如图 智能滑轮(症转) 1.6所示,此时选择的就是测量角 急旋转动力学装置 盖霞剖: 度的接收系数,但通过线性转换器 变成位移。 取消 确定 (4)在图1.4中的界面上找到图表处并 图1.6 移到光感应传感器上,得到如图 1.7的坐标显示,点击横轴钟面上,并选择数码式输入1,跳出小界面,然后选择位 置,如图1.8,纵轴上点击一下,选择模拟式输入A,选中强度,如图1.9,完成后 变成图1.10。 学工室 醉☒ 超案酸星示谢 (5)点击记录图标REC,此时 10.. 计算机准备数据采样,缓缓 E图 翻时 转动旋转移动传感器上的 滑轮,此时光感应传感应随 ®3节 着旋转移动传感器一起移 动,从而记录到衍射光斑的 光强,从一边转到另一边, (即过0位置,记录好两边 国区 的衍射花样)点一下Stop 时的谷) 图标,此时此记录到图1.11 的衍射图。 图1.7 科学工什室 (6)科学工作室提供了处理 数据的一些方法,如界面 aa画 的左下角有一组图标,如 圆萄留 图1.12其中(a)有统计 功能,(b)可以求到指定 迷转动次数,counts,counte然数 点的坐标。(c)还原等。 为g所no:试实 角证第,和6,G度利 南面加透军气,维度秒 (7)将狭缝的大小调换,再重 立或11ga理米) E率1inv.1n球黄米/秒 复上述内容。 ◆改的城输入了 国 (8)数据处理表格自拟。 :重数码式输入2 篇模拟式输入A, 。①时河输入 图1.8 33 (3)在图 1.4 的界面中,按下模拟插头并移到通道 A、B 或 C 中任一个(如 A)并点击 A 选择感应器为光传感器如图 1.5, 此时选择的就是测量光强的接收 系统,同样按下数码式插头并移到 通道 1、2 上,并点击 1 或 2 选择 感应器为旋转移动传感器。如图 1.6 所示,此时选择的就是测量角 度的接收系数,但通过线性转换器 变成位移。 (4)在图 1.4 中的界面上找到图表处并 移到光感应传感器上,得到如图 1.7 的坐标显示,点击横轴钟面上,并选择数码式输入 1,跳出小界面,然后选择位 置,如图 1.8,纵轴上点击一下,选择模拟式输入 A,选中强度,如图 1.9,完成后 变成图 1.10。 (5)点击记录图标 REC,此时 计算机准备数据采样,缓缓 转动旋转移动传感器上的 滑轮,此时光感应传感应随 着旋转移动传感器一起移 动,从而记录到衍射光斑的 光强,从一边转到另一边, (即过 0 位置,记录好两边 的衍射花样)点一下 Stop 图标,此时此记录到图 1.11 的衍射图。 (6)科学工作室提供了处理 数据的一些方法,如界面 的左下角有一组图标,如 图 1.12 其中(a)有统计 功能,(b)可以求到指定 点的坐标。(c)还原等。 (7)将狭缝的大小调换,再重 复上述内容。 (8)数据处理表格自拟。 图 1.6 图 1.7 图 1.8