正在加载图片...
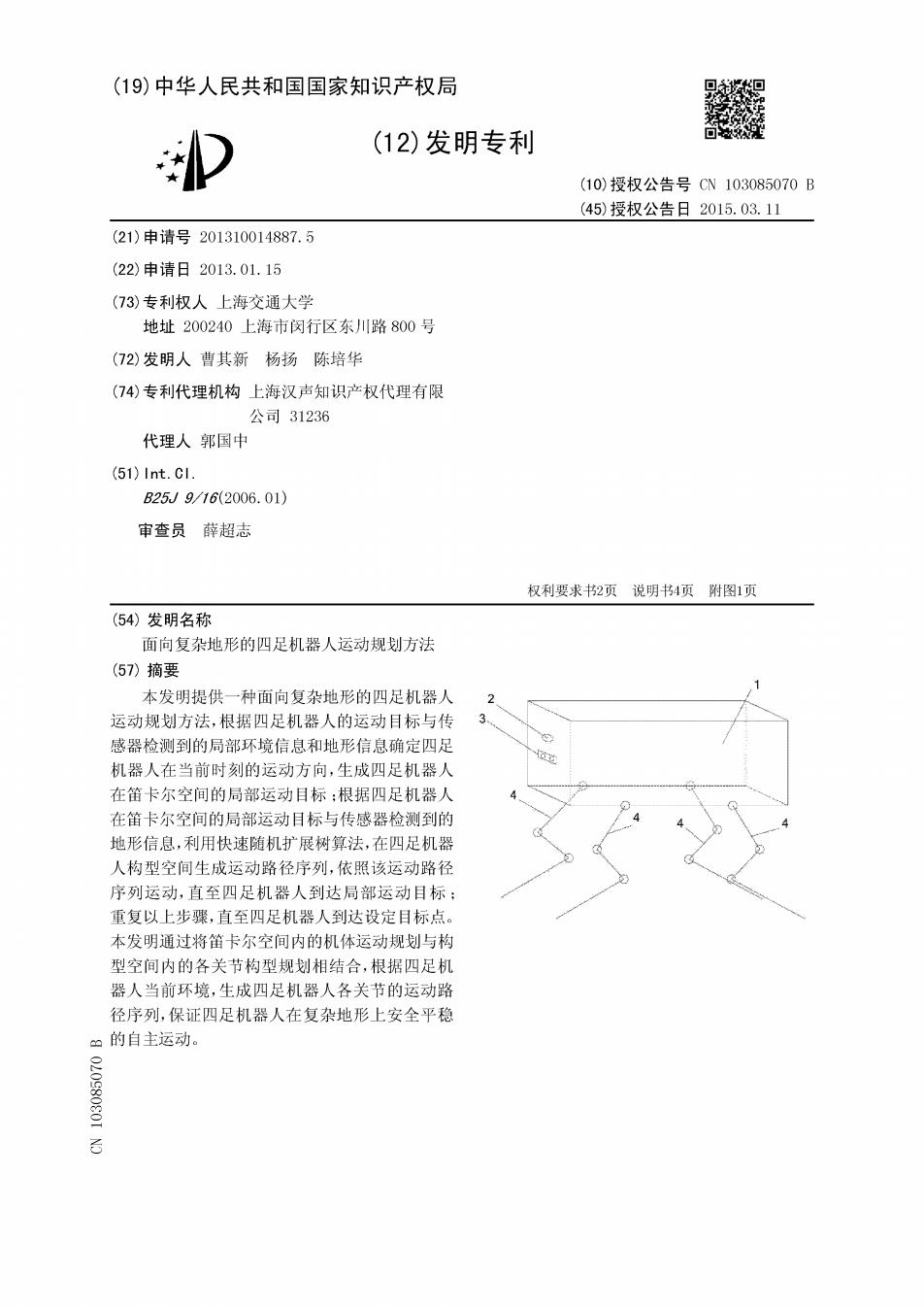
(19)中华人民共和国国家知识产权局 ▣▣ (12)发明专利 ▣ (10)授权公告号CN103085070B (45)授权公告日2015.03.11 (21)申请号201310014887.5 (22)申请日2013.01.15 (73)专利权人上海交通大学 地址200240上海市闵行区东川路800号 (72)发明人曹其新杨扬陈培华 (74)专利代理机构上海汉声知识产权代理有限 公司31236 代理人郭国中 (51)1nt.Cl. B25J9/16(2006.01) 审查员薛超志 权利要求书2页说明书4页附图1页 (54)发明名称 面向复杂地形的四足机器人运动规划方法 (57)摘要 本发明提供一种面向复杂地形的四足机器人 运动规划方法,根据四足机器人的运动目标与传 感器检测到的局部环境信息和地形信息确定四足 机器人在当前时刻的运动方向,生成四足机器人 在笛卡尔空间的局部运动目标:根据四足机器人 在笛卡尔空间的局部运动目标与传感器检测到的 地形信息,利用快速随机扩展树算法,在四足机器 人构型空间生成运动路径序列,依照该运动路径 序列运动,直至四足机器人到达局部运动目标; 重复以上步骤,直至四足机器人到达设定目标点。 本发明通过将笛卡尔空间内的机体运动规划与构 型空间内的各关节构型规划相结合,根据四足机 器人当前环境,生成四足机器人各关节的运动路 径序列,保证四足机器人在复杂地形上安全平稳 口的自主运动。 270990901