正在加载图片...
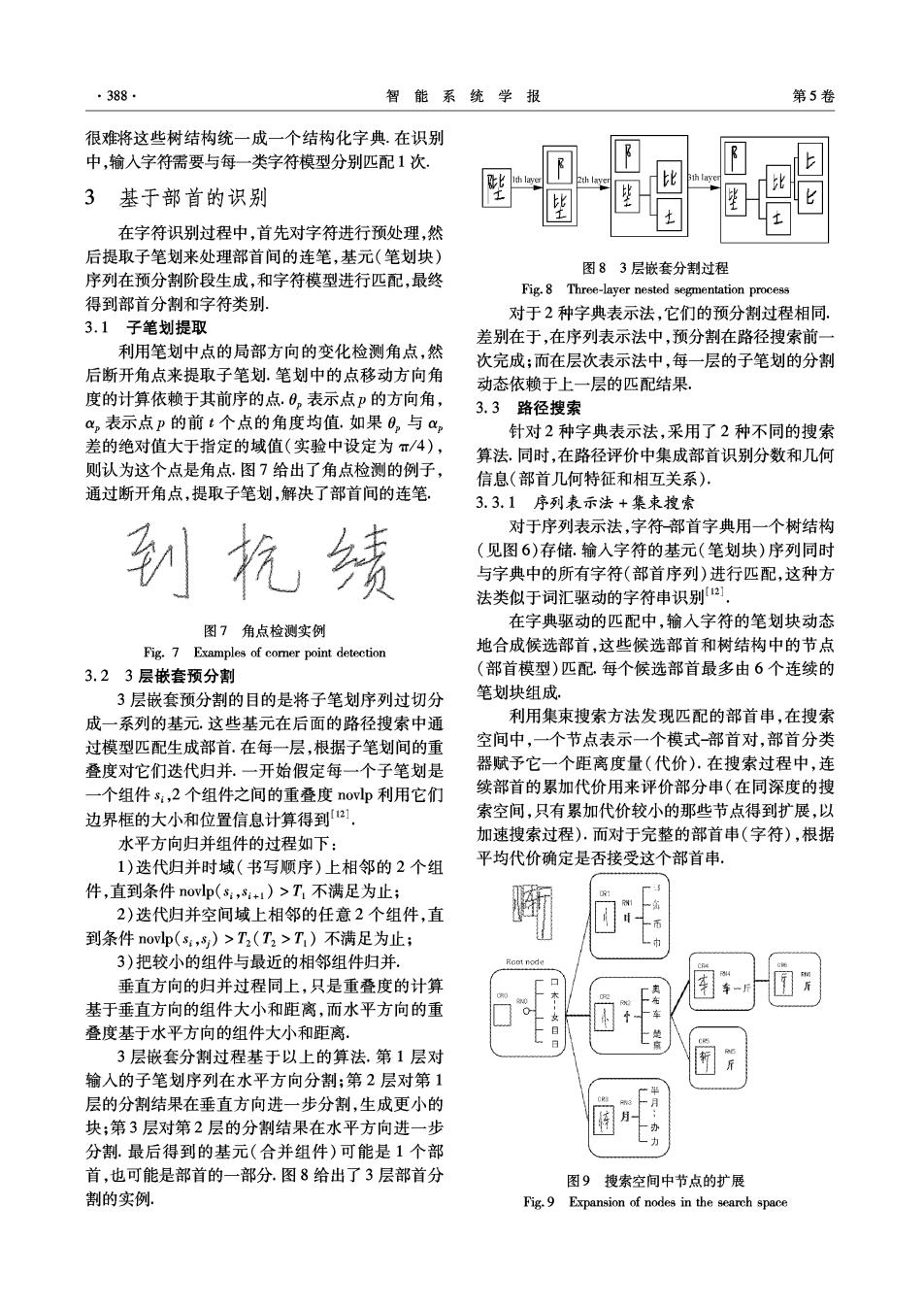
·388 智能系统学报 第5卷 很难将这些树结构统一成一个结构化字典.在识别 中,输入字符需要与每一类字符模型分别匹配1次 3 基于部首的识别 在字符识别过程中,首先对字符进行预处理,然 后提取子笔划来处理部首间的连笔,基元(笔划块) 图83层嵌套分割过程 序列在预分割阶段生成,和字符模型进行匹配,最终 Fig.8 Three-layer nested segmentation process 得到部首分割和字符类别. 对于2种字典表示法,它们的预分割过程相同。 3.1子笔划提取 差别在于,在序列表示法中,预分割在路径搜索前 利用笔划中点的局部方向的变化检测角点,然 次完成:而在层次表示法中,每一层的子笔划的分割 后断开角点来提取子笔划,笔划中的点移动方向角 动态依赖于上一层的匹配结果 度的计算依赖于其前序的点.日,表示点卫的方向角, 3.3路径搜索 a,表示点p的前t个点的角度均值.如果0与a2 针对2种字典表示法,采用了2种不同的搜索 差的绝对值大于指定的域值(实验中设定为/4), 算法.同时,在路径评价中集成部首识别分数和几何 则认为这个点是角点.图7给出了角点检测的例子, 信息(部首几何特征和相互关系). 通过断开角点,提取子笔划,解决了部首间的连笔。 3.3.1序列表示法+集束搜索 对于序列表示法,字符部首字典用一个树结构 利杭绩 (见图6)存储.输入字符的基元(笔划块)序列同时 与字典中的所有字符(部首序列)进行匹配,这种方 法类似于词汇驱动的字符串识别1 图7角点检测实例 在字典驱动的匹配中,输入字符的笔划块动态 Fig.7 Examples of comer point detection 地合成候选部首,这些候选部首和树结构中的节点 3.23层嵌套预分割 (部首模型)匹配.每个候选部首最多由6个连续的 3层嵌套预分割的目的是将子笔划序列过切分 笔划块组成。 成一系列的基元.这些基元在后面的路径搜索中通 利用集束搜索方法发现匹配的部首串,在搜索 过模型匹配生成部首.在每一层,根据子笔划间的重 空间中,一个节点表示一个模式部首对,部首分类 叠度对它们迭代归并.一开始假定每一个子笔划是 器赋予它一个距离度量(代价).在搜索过程中,连 一个组件s:,2个组件之间的重叠度novlp利用它们 续部首的累加代价用来评价部分串(在同深度的搜 边界框的大小和位置信息计算得到21, 索空间,只有累加代价较小的那些节点得到扩展,以 水平方向归并组件的过程如下: 加速搜索过程),而对于完整的部首串(字符),根据 1)迭代归并时域(书写顺序)上相邻的2个组 平均代价确定是否接受这个部首串。 件,直到条件novlp(s,+i)>T,不满足为止; 2)迭代归并空间域上相邻的任意2个组件,直 到条件novp(s,)>T,(T2>T)不满足为止; 3)把较小的组件与最近的相邻组件归并, Root node 垂直方向的归并过程同上,只是重叠度的计算 基于垂直方向的组件大小和距离,而水平方向的重 叠度基于水平方向的组件大小和距离。 3层嵌套分割过程基于以上的算法.第1层对 输入的子笔划序列在水平方向分割;第2层对第1 层的分割结果在垂直方向进一步分割,生成更小的 一月 块;第3层对第2层的分割结果在水平方向进一步 办 一力 分割.最后得到的基元(合并组件)可能是1个部 首,也可能是部首的一部分.图8给出了3层部首分 图9搜索空间中节点的扩展 割的实例. Fig.9 Expansion of nodes in the search space