正在加载图片...
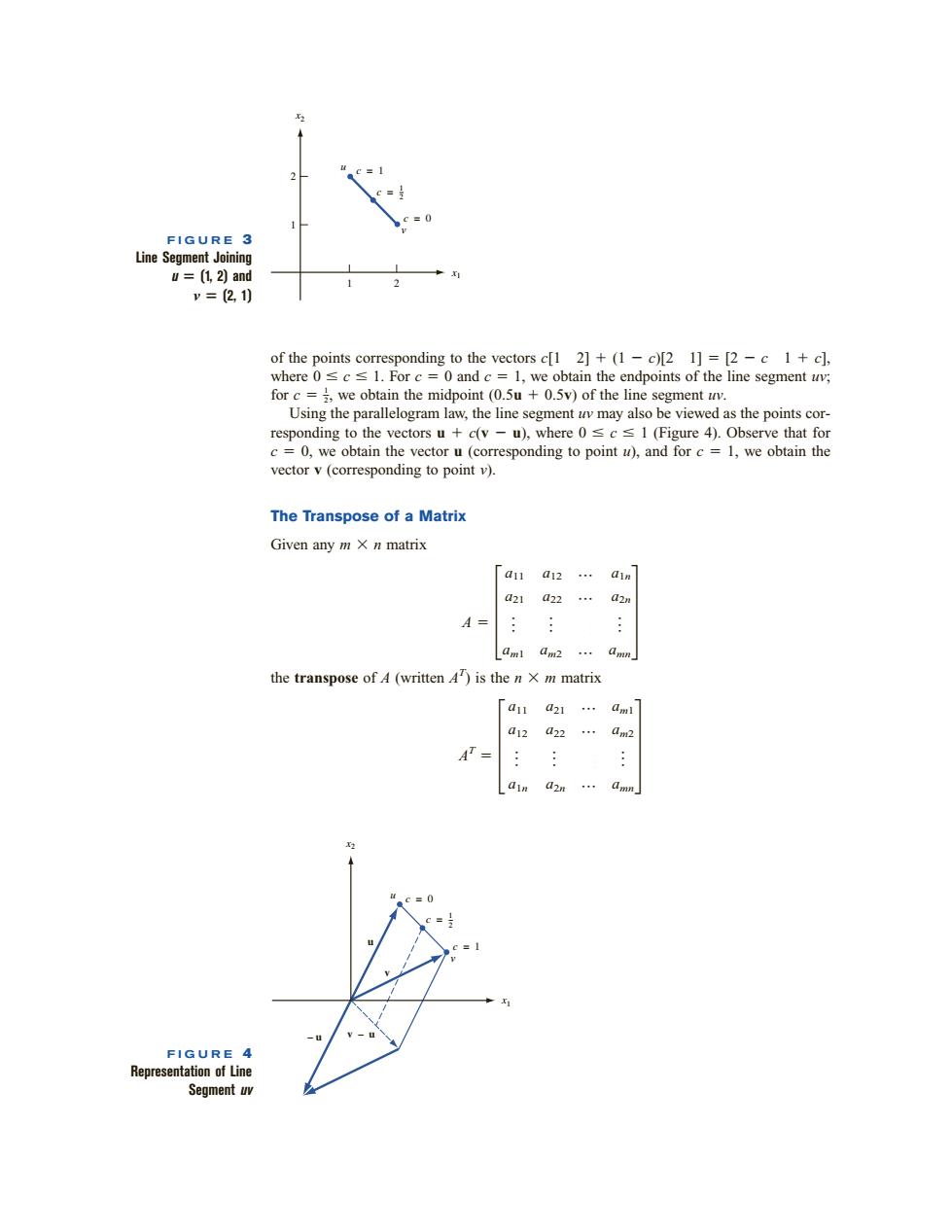
FIGURE 3 Line Segment Joining u=(1,2)and v=2,1) of the points corresponding to the vectors c[l 2]+(1-c)[2 1]=[2-c 1 c], where 0cs1.For c=0 and c=1,we obtain the endpoints of the line segment uv; for c=,we obtain the midpoint(0.5u +0.5v)of the line segment uv. Using the parallelogram law,the line segment i may also be viewed as the points cor- responding to the vectors u +c(v-u),where 0scs1 (Figure 4).Observe that for c=0,we obtain the vector u (corresponding to point u),and for c=1,we obtain the vector v(corresponding to point v). The Transpose of a Matrix Given any m X n matrix a11 a12 ain] a21 a22 … A2n A= .: . LamI dm2 … an】 the transpose of (written 4)is the n x m matrix a11 a21 amI a412 a22 am2 AT= : din a2n … amn FIGURE 4 Representation of Line Segment uvof the points corresponding to the vectors c[1 2] (1 c)[2 1] [2 c 1 c], where 0 c 1. For c 0 and c 1, we obtain the endpoints of the line segment uv; for c 1 2 , we obtain the midpoint (0.5u 0.5v) of the line segment uv. Using the parallelogram law, the line segment uv may also be viewed as the points corresponding to the vectors u c(v u), where 0 c 1 (Figure 4). Observe that for c 0, we obtain the vector u (corresponding to point u), and for c 1, we obtain the vector v (corresponding to point v). The Transpose of a Matrix Given any m n matrix A the transpose of A (written AT ) is the n m matrix AT am1 am2 amn a21 a22 a2n a11 a12 a1n a1n a2n amn a12 a22 am2 a11 a21 am1 2.1 Matrices and Vectors 15 2 x2 u c = 1 c = 0 c = v x1 1 1 2 1 2 FIGURE 3 Line Segment Joining u (1, 2) and v (2, 1) x2 u u – u v – u v c = 0 c = 1 c = v x1 1 2 FIGURE 4 Representation of Line Segment uv����������������