正在加载图片...
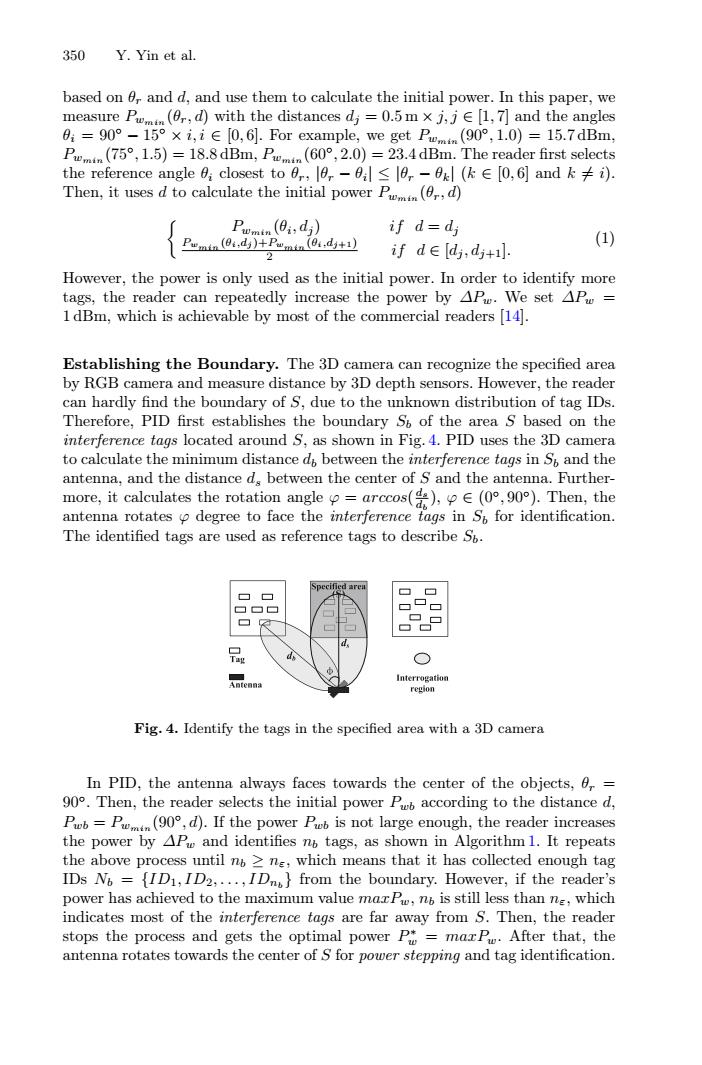
350 Y.Yin et al. based on 0r and d,and use them to calculate the initial power.In this paper,we measure P(0r,d)with the distances dj=0.5m x j,j[1,7]and the angles 0A:=90°-15°×i,i∈0,6.For example,we get Pin(90°,1.0)=15.7dBm, Pwmn(75°,1.5)=18.8dBm,Pwmn(60°,2.0)=23.4dBm.The reader first selects the reference angle 6:closest to6,le,-fl≤|9,-0kl(k∈[0,6andk≠i): Then,it uses d to calculate the initial power P(0,d) Pwmi(0,d) if d=dj Pwmin (dj)+Pwmn (d+1) (1) 2 if deldj,dj+1l However,the power is only used as the initial power.In order to identify more tags,the reader can repeatedly increase the power by AP.We set AP= 1 dBm,which is achievable by most of the commercial readers [14]. Establishing the Boundary.The 3D camera can recognize the specified area by RGB camera and measure distance by 3D depth sensors.However,the reader can hardly find the boundary of S,due to the unknown distribution of tag IDs. Therefore,PID first establishes the boundary So of the area S based on the interference tags located around S,as shown in Fig.4.PID uses the 3D camera to calculate the minimum distance do between the interference tags in S and the antenna,and the distance d between the center of S and the antenna.Further- more,it calculates the rotation angle=arccos(),(,90).Then,the antenna rotates p degree to face the interference tags in S for identification. The identified tags are used as reference tags to describe Sp. Specified area Anicmna Interrogation region Fig.4.Identify the tags in the specified area with a 3D camera In PID,the antenna always faces towards the center of the objects, 90.Then,the reader selects the initial power Pb according to the distance d, Pb=P(90,d).If the power P is not large enough,the reader increases the power by AP and identifies no tags,as shown in Algorithm 1.It repeats the above process until no>ne,which means that it has collected enough tag IDs N ={ID1,ID2,...,ID}from the boundary.However,if the reader's power has achieved to the maximum value maxP,no is still less than ne,which indicates most of the interference tags are far away from S.Then,the reader stops the process and gets the optimal power P=maxP.After that,the antenna rotates towards the center of S for power stepping and tag identification.350 Y. Yin et al. based on θr and d, and use them to calculate the initial power. In this paper, we measure Pwmin (θr, d) with the distances dj = 0.5 m × j, j ∈ [1, 7] and the angles θi = 90◦ − 15◦ × i, i ∈ [0, 6]. For example, we get Pwmin (90◦, 1.0) = 15.7 dBm, Pwmin (75◦, 1.5) = 18.8 dBm, Pwmin (60◦, 2.0) = 23.4 dBm. The reader first selects the reference angle θi closest to θr, |θr − θi|≤|θr − θk| (k ∈ [0, 6] and k = i). Then, it uses d to calculate the initial power Pwmin (θr, d) Pwmin (θi, dj ) if d = dj Pwmin (θi,dj )+Pwmin (θi,dj+1) 2 if d ∈ [dj , dj+1]. (1) However, the power is only used as the initial power. In order to identify more tags, the reader can repeatedly increase the power by ΔPw. We set ΔPw = 1 dBm, which is achievable by most of the commercial readers [14]. Establishing the Boundary. The 3D camera can recognize the specified area by RGB camera and measure distance by 3D depth sensors. However, the reader can hardly find the boundary of S, due to the unknown distribution of tag IDs. Therefore, PID first establishes the boundary Sb of the area S based on the interference tags located around S, as shown in Fig. 4. PID uses the 3D camera to calculate the minimum distance db between the interference tags in Sb and the antenna, and the distance ds between the center of S and the antenna. Furthermore, it calculates the rotation angle ϕ = arccos( ds db ), ϕ ∈ (0◦, 90◦). Then, the antenna rotates ϕ degree to face the interference tags in Sb for identification. The identified tags are used as reference tags to describe Sb. Fig. 4. Identify the tags in the specified area with a 3D camera In PID, the antenna always faces towards the center of the objects, θr = 90◦. Then, the reader selects the initial power Pwb according to the distance d, Pwb = Pwmin (90◦, d). If the power Pwb is not large enough, the reader increases the power by ΔPw and identifies nb tags, as shown in Algorithm 1. It repeats the above process until nb ≥ nε, which means that it has collected enough tag IDs Nb = {ID1,ID2,...,IDnb } from the boundary. However, if the reader’s power has achieved to the maximum value maxPw, nb is still less than nε, which indicates most of the interference tags are far away from S. Then, the reader stops the process and gets the optimal power P∗ w = maxPw. After that, the antenna rotates towards the center of S for power stepping and tag identification.�