正在加载图片...
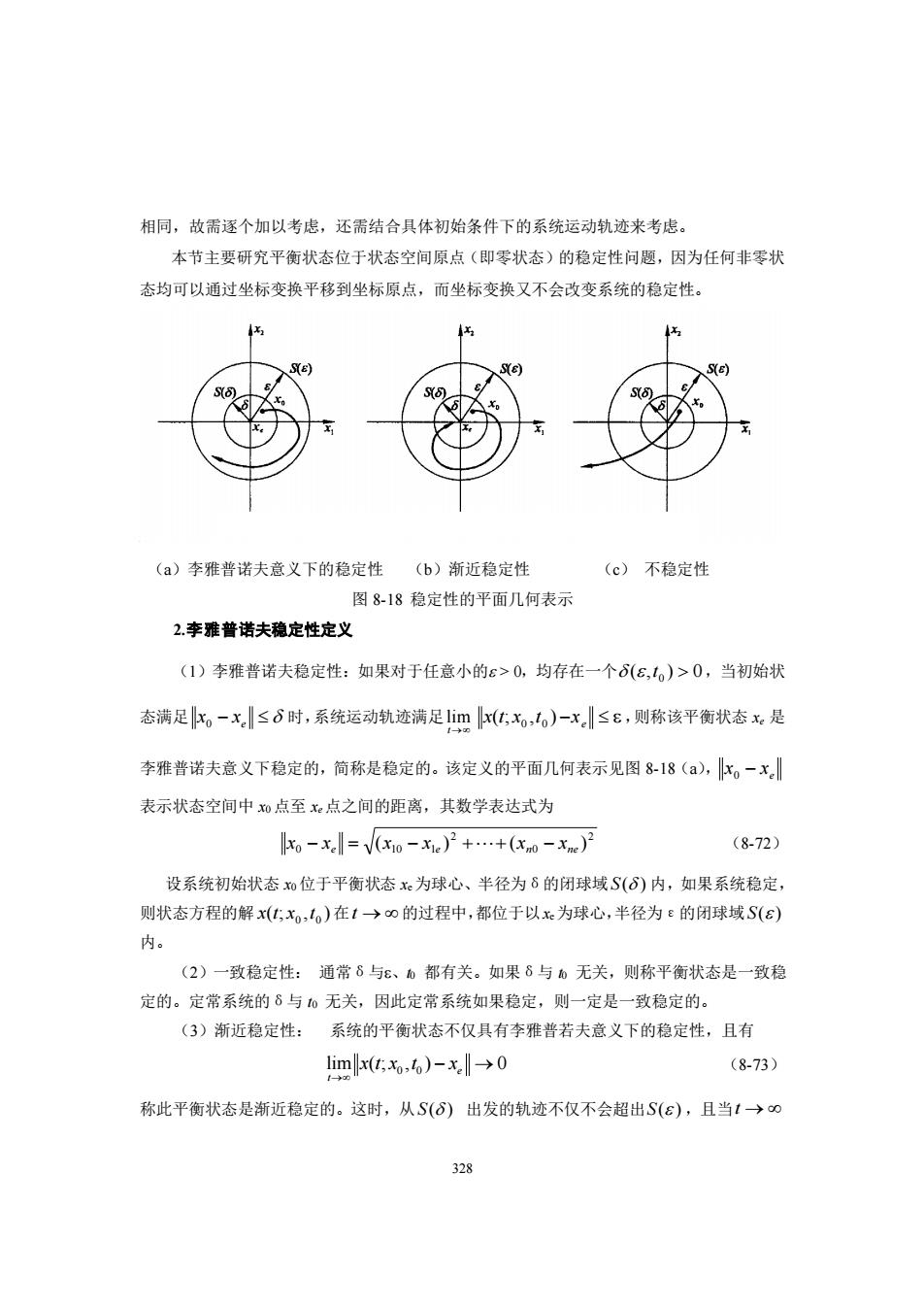
相同,故需逐个加以考虑,还需结合具体初始条件下的系统运动轨迹来考虑。 本节主要研究平衡状态位于状态空间原点(即零状态)的稳定性问题,因为任何非零状 态均可以通过坐标变换平移到坐标原点,而坐标变换又不会改变系统的稳定性。 (a)李雅普诺夫意义下的稳定性(b)渐近稳定性 (c)不稳定性 图818稳定性的平面几何表示 2.李雅普诺夫稳定性定义 (1)李雅普诺夫稳定性:如果对于任意小的>0,均存在一个6(6,l。)>0,当初始状 态满足飞。-x≤6时,系统运动轨迹满足imx(化,x,)-x≤6,则称该平衡状态,是 李雅普诺夫意义下稳定的,简称是稳定的。该定义的平面几何表示见图8-I8(),x。一x 表示状态空间中和点至x点之间的距离,其数学表达式为 -=Vxo-xe)尸++xo-x)2 (8-72) 设系统初始状态和位于平衡状态x为球心、半径为6的闭球域S(⑥)内,如果系统稳定, 则状态方程的解x化x,)在1→0的过程中,都位于以x为球心,半径为e的闭球域S(s) 内。 (2)一致稳定性:通常8与、面都有关。如果8与面无关,则称平衡状态是一致稳 定的。定常系统的6与无关,因此定常系统如果稳定,则一定是一致稳定的。 (3)渐近稳定性:系统的平衡状态不仅具有李雅普若夫意义下的稳定性,且有 limx(xo,6)-x→0 (8-73) 称此平衡状态是渐近稳定的。这时,从S()出发的轨迹不仅不会超出S(6),且当1→∞ 328 328 相同,故需逐个加以考虑,还需结合具体初始条件下的系统运动轨迹来考虑。 本节主要研究平衡状态位于状态空间原点(即零状态)的稳定性问题,因为任何非零状 态均可以通过坐标变换平移到坐标原点,而坐标变换又不会改变系统的稳定性。 (a)李雅普诺夫意义下的稳定性 (b)渐近稳定性 (c) 不稳定性 图 8-18 稳定性的平面几何表示 2.李雅普诺夫稳定性定义 (1)李雅普诺夫稳定性:如果对于任意小的 > 0,均存在一个 (,t 0 ) 0 ,当初始状 态满足 x0 − xe 时,系统运动轨迹满足 lim t→ − e x(t; x ,t ) x 0 0 ,则称该平衡状态 xe 是 李雅普诺夫意义下稳定的,简称是稳定的。该定义的平面几何表示见图 8-18(a), e x − x 0 表示状态空间中 x0 点至 xe点之间的距离,其数学表达式为 2 0 2 0 10 1 ( ) ( ) e e n ne x − x = x − x ++ x − x (8-72) 设系统初始状态 x0 位于平衡状态 xe为球心、半径为δ的闭球域 S( ) 内,如果系统稳定, 则状态方程的解 ( ; , ) 0 0 x t x t 在 t → 的过程中,都位于以xe为球心,半径为ε的闭球域 S( ) 内。 (2)一致稳定性: 通常δ与、t0 都有关。如果δ与 t0 无关,则称平衡状态是一致稳 定的。定常系统的δ与 t0 无关,因此定常系统如果稳定,则一定是一致稳定的。 (3)渐近稳定性: 系统的平衡状态不仅具有李雅普若夫意义下的稳定性,且有 0 0 lim ( ; , ) 0 e t x t x t x → − → (8-73) 称此平衡状态是渐近稳定的。这时,从 S( ) 出发的轨迹不仅不会超出 S( ) ,且当 t →