正在加载图片...
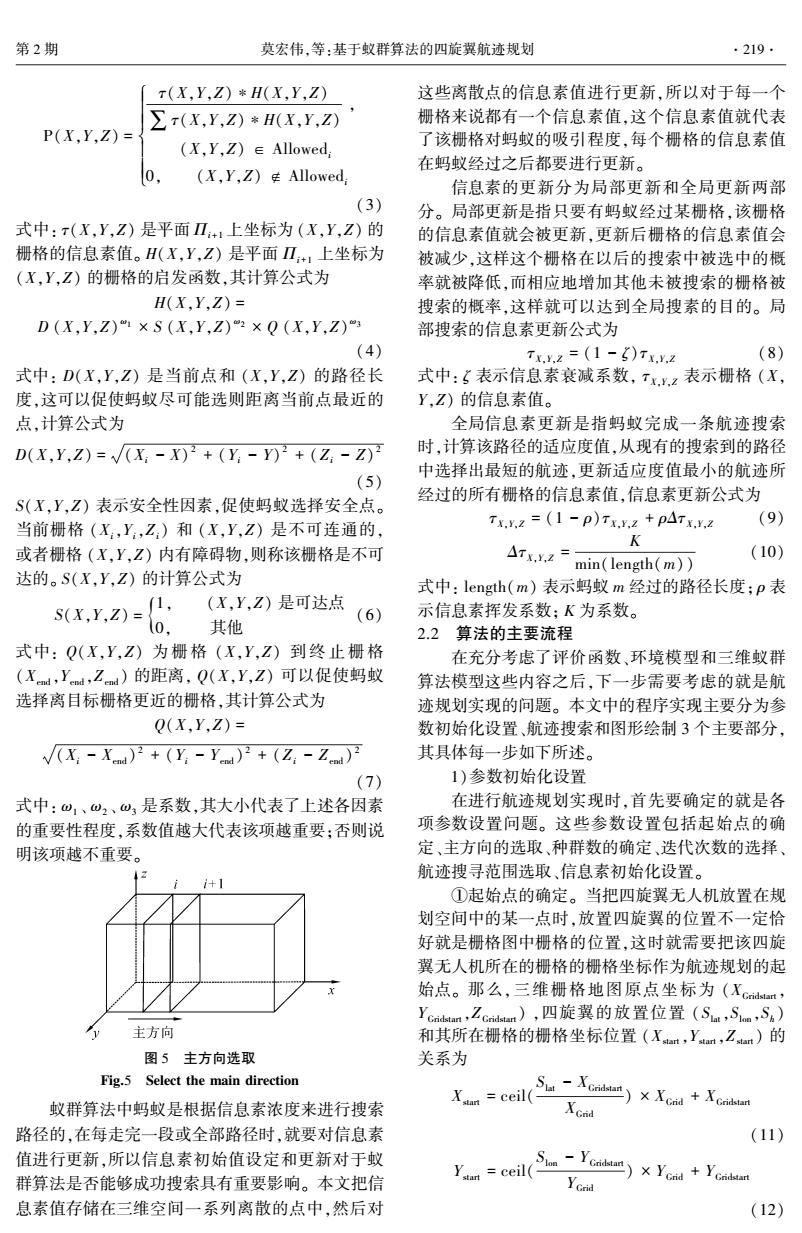
第2期 莫宏伟,等:基于蚁群算法的四旋冀航迹规划 ·219- T(X,Y,Z)*H(X,Y,Z) 这些离散点的信息素值进行更新,所以对于每一个 ∑x(X,Y,Z)*H(X,Y,Z) 栅格来说都有一个信息素值,这个信息素值就代表 P(X,Y,Z)= (X,Y,Z)∈Allowed: 了该栅格对蚂蚁的吸引程度,每个栅格的信息素值 在蚂蚁经过之后都要进行更新。 0. (X,Y,Z)Allowed, 信息素的更新分为局部更新和全局更新两部 (3) 分。局部更新是指只要有蚂蚁经过某栅格,该栅格 式中:(X,Y,Z)是平面Ⅱ+1上坐标为(X,Y,Z)的 的信息素值就会被更新,更新后栅格的信息素值会 栅格的信息素值。H(X,Y,Z)是平面Ⅱ+1上坐标为 被减少,这样这个栅格在以后的搜索中被选中的概 (X,Y,Z)的栅格的启发函数,其计算公式为 率就被降低,而相应地增加其他未被搜索的栅格被 H(X,Y,Z)= 搜索的概率,这样就可以达到全局搜素的目的。局 D(X,Y,Z)1×S(X,Y,Z)2×Q(X,Y,Z)3 部搜索的信息素更新公式为 (4) Tx.2=(1-g)Tx,2 (8) 式中:D(X,Y,Z)是当前点和(X,Y,Z)的路径长 式中:5表示信息素衰减系数,Txy,z表示栅格(X, 度,这可以促使蚂蚁尽可能选则距离当前点最近的 Y,Z)的信息素值。 点,计算公式为 全局信息素更新是指蚂蚁完成一条航迹搜索 D(X,Y,Z)=√/(X:-X)2+(Y:-Y)2+(Z,-Z)2 时,计算该路径的适应度值,从现有的搜索到的路径 中选择出最短的航迹,更新适应度值最小的航迹所 (5) 经过的所有栅格的信息素值,信息素更新公式为 S(X,Y,Z)表示安全性因素,促使蚂蚁选择安全点。 (9) 当前栅格(X,Y,Z)和(X,Y,Z)是不可连通的, Tx.v.z =(1 -p)Tx.Y.z +pATx..z 或者栅格(X,Y,Z)内有障碍物,则称该栅格是不可 x..=min(length(m)) (10) 达的。S(X,Y,Z)的计算公式为 式中:length(m)表示蚂蚁m经过的路径长度;p表 s(x,y,z)=. (X,Y,Z)是可达点 (6) 示信息素挥发系数;K为系数。 0. 其他 2.2算法的主要流程 式中:Q(X,Y,Z)为栅格(X,Y,Z)到终止栅格 在充分考虑了评价函数、环境模型和三维蚁群 (Xa,Ymd,Za)的距离,Q(X,Y,Z)可以促使蚂蚁 算法模型这些内容之后,下一步需要考虑的就是航 选择离目标栅格更近的栅格,其计算公式为 迹规划实现的问题。本文中的程序实现主要分为参 Q(X,Y,Z)= 数初始化设置、航迹搜索和图形绘制3个主要部分, √/(X:-Xd)2+(Y:-Ya)2+(Z:-Zd) 其具体每一步如下所述。 (7) 1)参数初始化设置 式中:ω1、w2、0,是系数,其大小代表了上述各因素 在进行航迹规划实现时,首先要确定的就是各 的重要性程度,系数值越大代表该项越重要;否则说 项参数设置问题。这些参数设置包括起始点的确 明该项越不重要。 定、主方向的选取、种群数的确定、迭代次数的选择 42 航迹搜寻范围选取、信息素初始化设置。 i+1 ①起始点的确定。当把四旋翼无人机放置在规 划空间中的某一点时,放置四旋翼的位置不一定恰 好就是栅格图中栅格的位置,这时就需要把该四旋 翼无人机所在的栅格的栅格坐标作为航迹规划的起 始点。那么,三维栅格地图原点坐标为(Xc, Yd,Gridan),四旋翼的放置位置(St,Sm,Sa) 主方向 和其所在栅格的栅格坐标位置(Xa,Yat,乙)的 图5主方向选取 关系为 Fig.5 Select the main direction =ceil 蚁群算法中蚂蚁是根据信息素浓度来进行搜索 Su-Xcridsant)xXca+X cndn 路径的,在每走完一段或全部路径时,就要对信息素 (11) 值进行更新,所以信息素初始值设定和更新对于蚁 群算法是否能够成功搜索具有重要影响。本文把信 息素值存储在三维空间一系列离散的点中,然后对 (12)P(X,Y,Z) = τ(X,Y,Z)∗H(X,Y,Z) ∑τ(X,Y,Z)∗H(X,Y,Z) , (X,Y,Z) ∈ Allowedi 0, (X,Y,Z) ∉ Allowedi ì î í ï ï ï ï ïï (3) 式中: τ(X,Y,Z) 是平面 Πi+1 上坐标为 (X,Y,Z) 的 栅格的信息素值。 H(X,Y,Z) 是平面 Πi+1 上坐标为 (X,Y,Z) 的栅格的启发函数,其计算公式为 H(X,Y,Z) = D (X,Y,Z) ω1 × S (X,Y,Z) ω2 × Q (X,Y,Z) ω3 (4) 式中: D(X,Y,Z) 是当前点和 (X,Y,Z) 的路径长 度,这可以促使蚂蚁尽可能选则距离当前点最近的 点,计算公式为 D(X,Y,Z) = (Xi - X) 2 + (Yi - Y) 2 + (Zi - Z) 2 (5) S(X,Y,Z) 表示安全性因素,促使蚂蚁选择安全点。 当前栅格 (Xi,Yi,Zi) 和 (X,Y,Z) 是不可连通的, 或者栅格 (X,Y,Z) 内有障碍物,则称该栅格是不可 达的。 S(X,Y,Z) 的计算公式为 S(X,Y,Z) = 1, (X,Y,Z) 是可达点 {0, 其他 (6) 式中: Q(X,Y,Z) 为 栅 格 (X,Y,Z) 到 终 止 栅 格 (Xend ,Yend ,Zend ) 的距离, Q(X,Y,Z) 可以促使蚂蚁 选择离目标栅格更近的栅格,其计算公式为 Q(X,Y,Z) = (Xi - Xend ) 2 + (Yi - Yend ) 2 + (Zi - Zend ) 2 (7) 式中: ω1 、 ω2 、 ω3 是系数,其大小代表了上述各因素 的重要性程度,系数值越大代表该项越重要;否则说 明该项越不重要。 图 5 主方向选取 Fig.5 Select the main direction 蚁群算法中蚂蚁是根据信息素浓度来进行搜索 路径的,在每走完一段或全部路径时,就要对信息素 值进行更新,所以信息素初始值设定和更新对于蚁 群算法是否能够成功搜索具有重要影响。 本文把信 息素值存储在三维空间一系列离散的点中,然后对 这些离散点的信息素值进行更新,所以对于每一个 栅格来说都有一个信息素值,这个信息素值就代表 了该栅格对蚂蚁的吸引程度,每个栅格的信息素值 在蚂蚁经过之后都要进行更新。 信息素的更新分为局部更新和全局更新两部 分。 局部更新是指只要有蚂蚁经过某栅格,该栅格 的信息素值就会被更新,更新后栅格的信息素值会 被减少,这样这个栅格在以后的搜索中被选中的概 率就被降低,而相应地增加其他未被搜索的栅格被 搜索的概率,这样就可以达到全局搜素的目的。 局 部搜索的信息素更新公式为 τX,Y,Z = (1 - ζ)τX,Y,Z (8) 式中: ζ 表示信息素衰减系数, τX,Y,Z 表示栅格 (X, Y,Z) 的信息素值。 全局信息素更新是指蚂蚁完成一条航迹搜索 时,计算该路径的适应度值,从现有的搜索到的路径 中选择出最短的航迹,更新适应度值最小的航迹所 经过的所有栅格的信息素值,信息素更新公式为 τX,Y,Z = (1 - ρ)τX,Y,Z + ρΔτX,Y,Z (9) ΔτX,Y,Z = K min(length(m)) (10) 式中: length(m) 表示蚂蚁 m 经过的路径长度; ρ 表 示信息素挥发系数; K 为系数。 2.2 算法的主要流程 在充分考虑了评价函数、环境模型和三维蚁群 算法模型这些内容之后,下一步需要考虑的就是航 迹规划实现的问题。 本文中的程序实现主要分为参 数初始化设置、航迹搜索和图形绘制 3 个主要部分, 其具体每一步如下所述。 1)参数初始化设置 在进行航迹规划实现时,首先要确定的就是各 项参数设置问题。 这些参数设置包括起始点的确 定、主方向的选取、种群数的确定、迭代次数的选择、 航迹搜寻范围选取、信息素初始化设置。 ①起始点的确定。 当把四旋翼无人机放置在规 划空间中的某一点时,放置四旋翼的位置不一定恰 好就是栅格图中栅格的位置,这时就需要把该四旋 翼无人机所在的栅格的栅格坐标作为航迹规划的起 始点。 那么,三维栅格地图原点坐标为 (XGridstart, YGridstart,ZGridstart) ,四旋翼的放置位置 (Slat,Slon ,Sh ) 和其所在栅格的栅格坐标位置 (Xstart,Ystart,Zstart) 的 关系为 Xstart = ceil( Slat - XGridstart XGrid ) × XGrid + XGridstart (11) Ystart = ceil( Slon - YGridstart YGrid ) × YGrid + YGridstart (12) 第 2 期 莫宏伟,等:基于蚁群算法的四旋翼航迹规划 ·219·