正在加载图片...
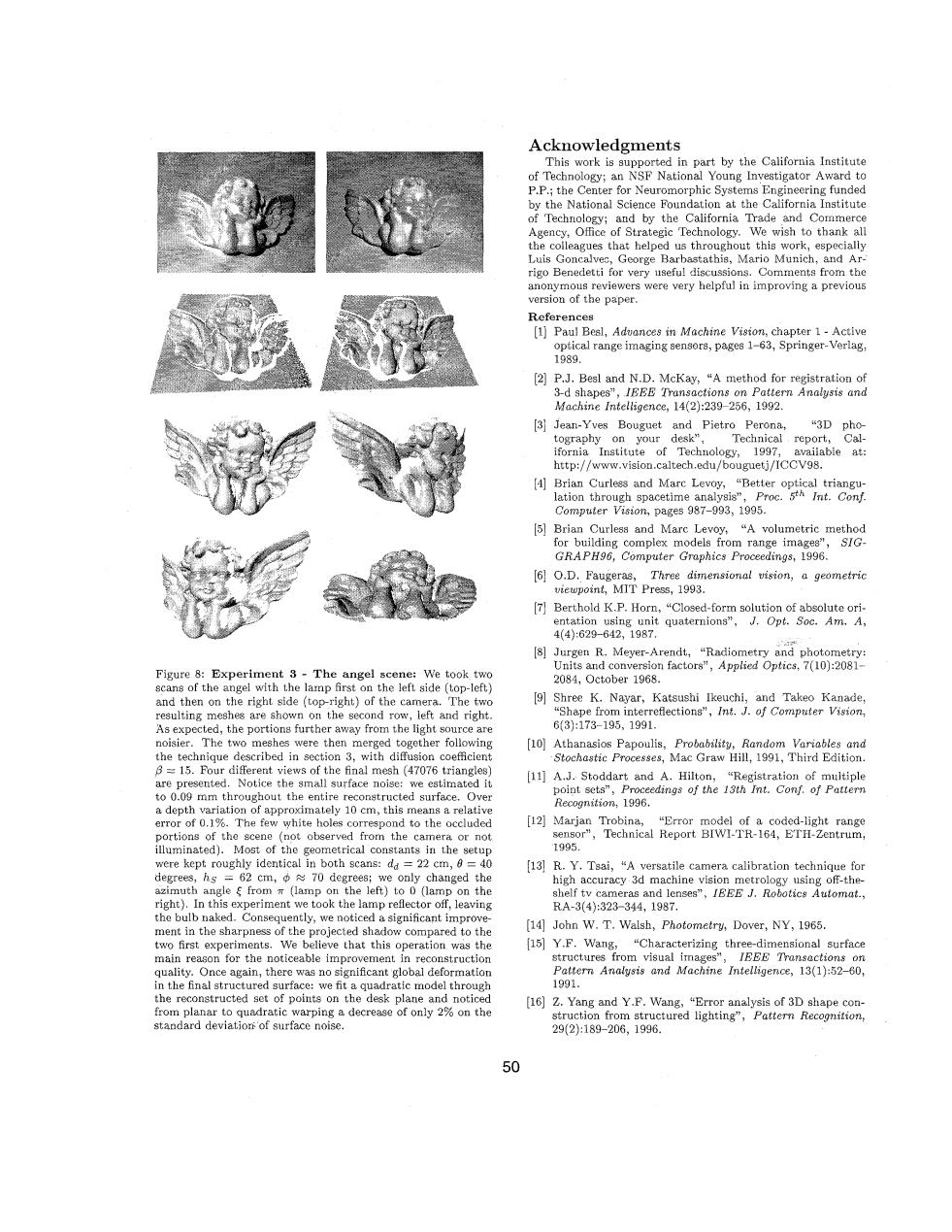
Acknowledgments This work is supported in part by the California Institute of Technology;an NSF National Young Investigator Award to P.P.;the Center for Neuromorphic Systems Engineering funded by the National Science Foundation at the California Institute of Technology;and by the California Trade and Commerce Agency,Office of Strategic Technology.We wish to thank all the colleagues that helped us throughout this work,especially Luis Goncalvec,George Barbastathis,Mario Munich,and Ar- rigo Benedetti for very useful discussions.Comments from the anonymous reviewers were very helpful in improving a previous version of the paper. References [1]Paul Besl,Aduances in Machine Vision,chapter 1-Active optical range imaging sensors,pages 1-63,Springer-Verlag, 1989. [②☒P.J,Besl and N.D.McKay,“A method for registration of 3-d shapes",IEEE Transactions on Pattern Analysis and Machine Intelligence,14(2):239-256,1992. [3]Jean-Yves Bouguet and Pietro Perona, 3D pho- tography on your desk", Technical report, Cal ifornia Institute of Technology,1997,available at: http://www.vision.caltech.edu/bouguetj/ICCV98. [4]Brian Curless and Marc Levoy,"Better optical triangu- lation through spacetime analysis",Proc.5th Int.Conf. Computer Vision,pages 987-993,1995. [5]Brian Curless and Marc Levoy,"A volumetric method for building complex models from range images",S/G- GRAPH96,Computer Graphics Proceedings,1996. [6]O.D.Faugeras,Three dimensional vision,a geometric viewpoint,MIT Press,1993. [7]Berthold K.P.Horn,"Closed-form solution of absolute ori- entation using unit quaternions",J.Opt.Soc.Am.A, 4(4):629-642,1987, [8]Jurgen R.Meyer-Arendt,"Radiometry and photometry: Units and conversion factors",Applied Optics,7(10):2081 Figure 8:Experiment 3-The angel scene:We took two 2084,October 1968. scans of the angel with the lamnp first on the left side (top-left) and then on the right side(top-right)of the camera.The two [9]Shree K.Nayar,Katsushi Ikeuchi,and Takeo Kanade, resulting meshes are shown on the second row,left and right. "Shape from interreflectiong",Int.J.of Computer Vision, As expected,the portions further away from the light source are 6(3):173-195,1991. noisier.The two meshes were then merged together following 10 Athanasios Papoulis,Probability,Random Variables and the technique described in section 3,with diffusion coefficient Stochastic Processes,Mac Graw Hill,1991,Third Edition. B=15.Four different views of the final mesh (47076 triangles) are presented.Notice the small surface noise:we estimated it [11]A.J.Stoddart and A.Hilton,"Registration of multiple to 0.09 mm throughout the entire reconstructed surface.Over point sets",Proceedings of the 13th Int.Conf.of Pattern a depth variation of approximately 10 cm,this means a relative Recognition,1996. error of 0.1%.The few white holes correspond to the occluded [12]Marjan Trobina, "Error model of a coded-light range portions of the scene (not observed from the camera or not sensor",Technical Report BIWI-TR-164,ETH-Zentrum illuminated).Most of the geometrical constants in the setup 1995. were kept roughly identical in both scans:da=22 cm,0=40 [13]R.Y.Tsai,"A versatile camera calibration technique for degrees,hs =62 cm,70 degrees;we only changed the high accuracy 3d machine vision metrology using off-the- azimuth angle g from (lamp on the left)to 0(lamp on the shelf tv cameras and lenses",IBEE J.Robotics Automat., right).In this experiment we took the lamp reflector off,leaving RA-3(4):323-344,1987. the bulb naked.Consequently,we noticed a significant improve- ment in the sharpness of the projected shadow compared to the [14]John W.T.Walsh,Photometry,Dover,NY,1965. two first experiments.We believe that this operation was the [15]Y.F.Wang,"Characterizing three-dimensional surface main reason for the noticeable improvement in reconstruction structures from visual images",IEEE Transactions on quality.Once again,there was no significant global deformation Pattern Analysis and Machine Intelligence,13(1):52-60, in the final structured surface:we fit a quadratic model through 1991. the reconstructed set of points on the desk plane and noticed [16]Z.Yang and Y.F.Wang,"Error analysis of 3D shape con- from planar to quadratic warping a decrease of only 2%on the struction from structured lighting",Pattern Recognition, standard deviation of surface noise. 29(2):189-206,1996. 50Figure 8: Experiment 3 - The angel scene: We took two scans of the angel with the lamp first on the left side (top-left) and then on the right side (top-right) of the camera. The two resulting meshes are shown on the second row, left and right. As expected, the portions further away from the light source are noisier. The two meshes were then merged together following the technique described in section 3, with diffusion coefficient /3 = 15. Four different views of the final mesh (47076 triangles) are presented. Notice the small surface noise: we estimated it to 0.09 mm throughout the entire reconstructed surface. Over a depth variation of approximately 10 cm, this means a relative error of 0.1%. The few white holes correspond to the occluded portions of the scene (not observed from the camera or not illuminated). Most of the geometrical constants in the setup were kept roughly identical in both scans: dd = 22 cm, 6’ = 40 degrees, hs = 62 cm, q5 x 70 degrees; we only changed the azimuth angle < from T (lamp on the left) to 0 (lamp on the right). In this experiment we took the lamp reflector off, leaving the bulb naked. Consequently, we noticed a significant improvement in the sharpness of the projected shadow compared to the two first experiments. We believe that this operation was the main reason for the noticeable improvement in reconstruction quality. Once again, there was no significant global deformation in the final structured surface: we fit a quadratic model through the reconstructed set of points on the desk plane and noticed from planar to quadratic warping a decrease of only 2% on the standard deviation. of surface noise. Acknowledgments This work is supported in part by the California Institute of Technology; an NSF National Young Investigator Award to P.P.; the Center for Neuromorphic Systems Engineering funded by the National Science Foundation at the California Institute of Technology; and by the California Trade .and Commerce Agency, Office of Strategic Technology. We wish to thank all the colleagues that helped us throughout this work, especially Luis Goncalvec, George Barbastathis, Mario Munich, and Arrig0 Benedetti for very useful discussions. Comments from the anonymous reviewers were very helpful in improving a previous version of the paper. References [l] Paul Bed, Advances in Machine Vision, chapter 1 - Active optical range imaging sensors, pages 1-63, Springer-Verlag, 1989. [a] P.J. Besl and N.D. McKay, “A method for registration of 3-d shapes”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2):239-256, 1992. [3] Jean-Yves Bouguet and Pietro Perona, “3D photography on your desk”, Technical report, California Institute of Technology, 1997, available at: http://www.vision.caltech.edu/bouguetj/ICCV98. [4] Brian Curless and Marc Levoy, “Better optical triangulation through spacetime analysis”, Proc. 5th Int. Conf. Computer Vision, pages 987-993, 1995. [5] Brian Curless and Marc Levoy, “A volumetric method for building complex models from range images”, SIGGRAPHSG, Computer Graphics Proceedings, 1996. [6] O.D. Faugeras, Three dimensional vision, a geometric viewpoint, MIT Press, 1993. [7] Berthold K.P. Horn, “Closed-form solution of absolute orientation using unit quaternions”, J. Opt. Soc. Am. A, [SI Jurgen R. Meyer-Arendt, “Radiometry and photometry: 4(4):629-642, 1987. Units and conversion factors”, Applied Optics, 7(10):2081- 2084, October 1968. Shree K. Nayar, Katsushi Ikeuchi, and Takeo Kanade, “Shape from interreflections”, Int. J. of Computer Vision, Athanasios Papoulis, Probability, Random Variables and Stochastic Processes, Mac Graw Hill, 1991, Third Edition. A.J. Stoddart and A. Hilton, “Registration of multiple point sets”, Proceedings of the 13th Int. Cons. of Pattern Recognition, 1996. Marjan Trobina, “Error model of a coded-light range sensor”, Technical Report BIWI-TR-164, ETH-Zentrum, 1995. R. Y. Tsai, “A versatile camera calibration technique for high accuracy 3d machine vision metrology using off-theshelf tv cameras and lenses”, IEEE J. Robotics Automat., John W. T. Walsh, Photometry, Dover, NY, 1965. Y.F. Wang, “Characterizing three-dimensional surface structures from visual images”, IEEE Pansactions on Pattern Analysis and Machine Intelligence, 13( 1):52-60, 1991. 2. Yang and Y.F. Wang, “Error analysis of 3D shape construction from structured lighting”, Pattern Recognition, 6(3):173-195, 1991. RA-3(4):323-344, 1987. 29(2):189-206, 1996. 50