正在加载图片...
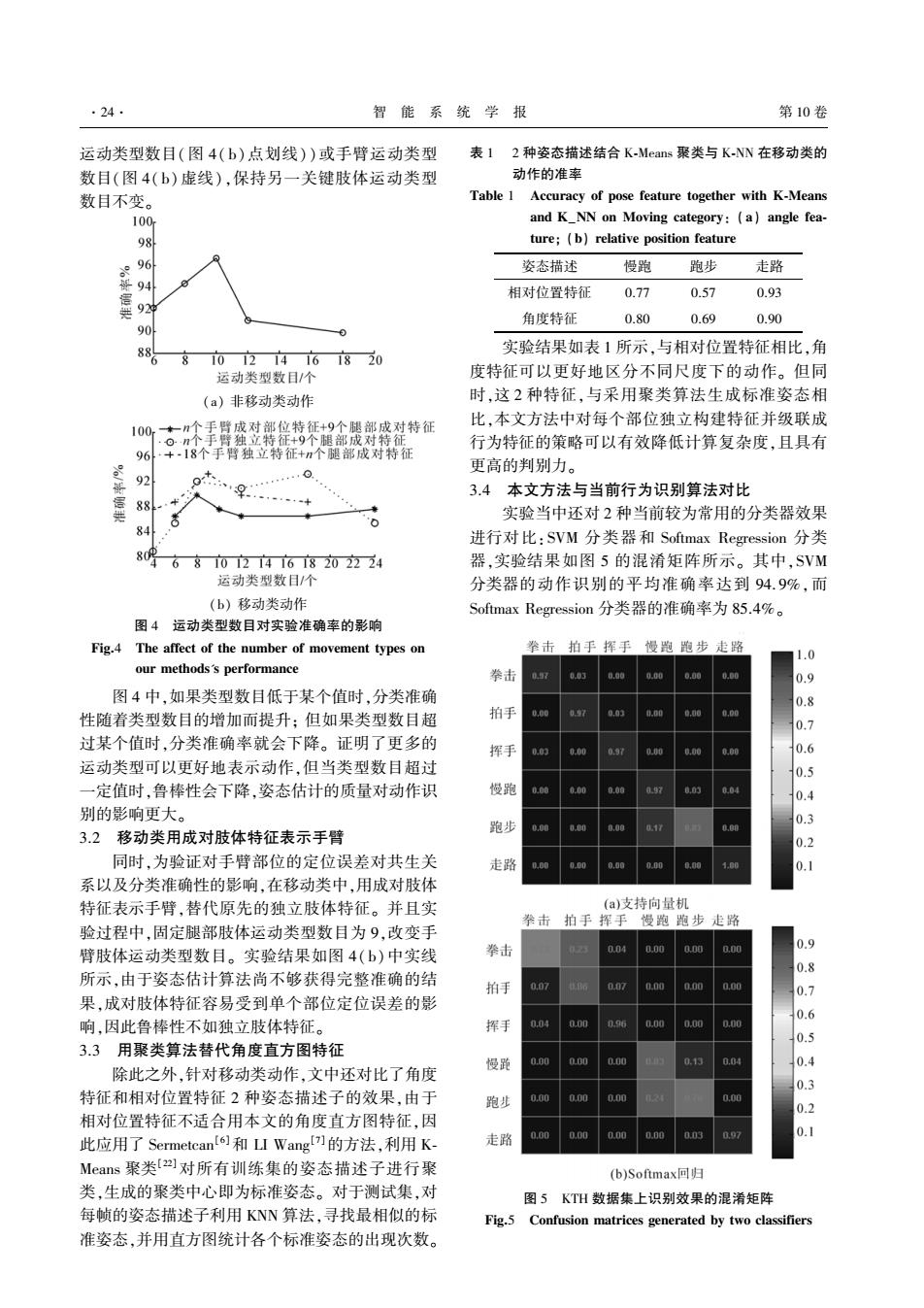
.24 智能系统学报 第10卷 运动类型数目(图4(b)点划线))或手臂运动类型 表12种姿态描述结合K-Means聚类与K-NN在移动类的 数目(图4(b)虚线),保持另一关键肢体运动类型 动作的准率 数目不变。 Table 1 Accuracy of pose feature together with K-Means 100 and K_NN on Moving category:(a)angle fea- 98 ture;(b)relative position feature 96 姿态描述 慢跑 跑步 走路 94 相对位置特征 0.77 0.57 0.93 92 角度特征 0.80 0.69 0.90 90 88 实验结果如表1所示,与相对位置特征相比,角 8101214161820 运动类型数目/个 度特征可以更好地区分不同尺度下的动作。但同 (a)非移动类动作 时,这2种特征,与采用聚类算法生成标准姿态相 100,*个手臂成对部位特征+9个腿部成对特征 比,本文方法中对每个部位独立构建特征并级联成 「·。n个手臀独立特征+9个腿部成对特征 行为特征的策略可以有效降低计算复杂度,且具有 96+-18个手臂独立特征+n个腿部成对特征 0: 更高的判别力。 92 884-* g…0 3.4本文方法与当前行为识别算法对比 10 实验当中还对2种当前较为常用的分类器效果 8 进行对比:SVM分类器和Softmax Regression分类 80 681012141618202224 器,实验结果如图5的混淆矩阵所示。其中,SVM 运动类型数目/个 分类器的动作识别的平均准确率达到94.9%,而 (b)移动类动作 Softmax Regression分类器的准确率为85.4%。 图4运动类型数目对实验准确率的影响 Fig.4 The affect of the number of movement types on 拳击拍手挥手慢跑跑步走路 1.0 our methods's performance 拳击 0.57 0.00 0.00 0.D0 0.9 图4中,如果类型数目低于某个值时,分类准确 0.8 性随着类型数目的增加而提升:但如果类型数目超 拍手 0,00 .97 0.09 0.00 ,0 0.7 过某个值时,分类准确率就会下降。证明了更多的 挥手 0.03 0.00 0.9 0.00 0.00 0.00 0.6 运动类型可以更好地表示动作,但当类型数目超过 0.5 一定值时,鲁棒性会下降,姿态估计的质量对动作识 慢跑 0.00 0.00 097 0.0 0.04 0.4 别的影响更大。 0.3 3.2移动类用成对肢体特征表示手臂 跑步 0,00 0.00 0.00 0.17 0.2 同时,为验证对手臂部位的定位误差对共生关 走路 0,0 0.00 0.0 0.1 系以及分类准确性的影响,在移动类中,用成对肢体 特征表示手臂,替代原先的独立肢体特征。并且实 (a)支持向量机 拳击拍手挥手慢跑跑步走路 验过程中,固定腿部肢体运动类型数目为9,改变手 臂肢体运动类型数目。实验结果如图4(b)中实线 拳击 0.04 o oo a间 0.00 0.9 所示,由于姿态估计算法尚不够获得完整准确的结 0.8 拍手 0.07 007 0.00 0.00 0.00 0.7 果,成对肢体特征容易受到单个部位定位误差的影 0.6 响,因此鲁棒性不如独立肢体特征。 挥手 0.04 0.00 0.96 0.00 0.00 0.00 3.3 用聚类算法替代角度直方图特征 0.5 慢跑 0.00 0.00 0.13 0.0 0.4 除此之外,针对移动类动作,文中还对比了角度 0.3 特征和相对位置特征2种姿态描述子的效果,由于 跑步 0.00 0.00 0.00 0.00 0.2 相对位置特征不适合用本文的角度直方图特征,因 此应用了Sermetcant6]和LI Wang[)的方法,利用K- 走路 0.00 0.00 0.00 0.00 0.03 0.97 0.1 Means聚类[2]对所有训练集的姿态描述子进行聚 (b)Softmax回归 类,生成的聚类中心即为标准姿态。对于测试集,对 图5KTH数据集上识别效果的混淆矩阵 每帧的姿态描述子利用KNN算法,寻找最相似的标 Fig.5 Confusion matrices generated by two classifiers 准姿态,并用直方图统计各个标准姿态的出现次数。运动类型数目渊图 源渊遭冤点划线冤 冤或手臂运动类型 数目渊图 源渊遭冤虚线冤 袁保持另一关键肢体运动类型 数目不变遥 渊葬冤 非移动类动作 渊遭冤 移动类动作 图 源摇 运动类型数目对实验准确率的影响 云蚤早援源摇 栽澡藻 葬枣枣藻糟贼 燥枣 贼澡藻 灶怎皂遭藻则 燥枣 皂燥增藻皂藻灶贼 贼赠责藻泽 燥灶 燥怎则 皂藻贼澡燥凿泽鸳泽 责藻则枣燥则皂葬灶糟藻 摇 摇 图 源 中袁如果类型数目低于某个值时袁分类准确 性随着类型数目的增加而提升曰 但如果类型数目超 过某个值时袁分类准确率就会下降遥 证明了更多的 运动类型可以更好地表示动作袁但当类型数目超过 一定值时袁鲁棒性会下降袁姿态估计的质量对动作识 别的影响更大遥 猿援圆摇 移动类用成对肢体特征表示手臂 同时袁为验证对手臂部位的定位误差对共生关 系以及分类准确性的影响袁在移动类中袁用成对肢体 特征表示手臂袁替代原先的独立肢体特征遥 并且实 验过程中袁固定腿部肢体运动类型数目为 怨袁改变手 臂肢体运动类型数目遥 实验结果如图 源渊遭冤中实线 所示袁由于姿态估计算法尚不够获得完整准确的结 果袁成对肢体特征容易受到单个部位定位误差的影 响袁因此鲁棒性不如独立肢体特征遥 猿援猿摇 用聚类算法替代角度直方图特征 除此之外袁针对移动类动作袁文中还对比了角度 特征和相对位置特征 圆 种姿态描述子的效果袁由于 相对位置特征不适合用本文的角度直方图特征袁因 此应用了 杂藻则皂藻贼糟葬灶咱远暂和 蕴陨 宰葬灶早咱苑暂的方法袁利用 运鄄 酝藻葬灶泽 聚类咱圆圆暂对所有训练集的姿态描述子进行聚 类袁生成的聚类中心即为标准姿态遥 对于测试集袁对 每帧的姿态描述子利用 运晕晕 算法袁寻找最相似的标 准姿态袁并用直方图统计各个标准姿态的出现次数遥 表 员摇 圆 种姿态描述结合 运鄄酝藻葬灶泽 聚类与 运鄄晕晕 在移动类的 动作的准率 栽葬遭造藻 员摇 粤糟糟怎则葬糟赠 燥枣 责燥泽藻 枣藻葬贼怎则藻 贼燥早藻贼澡藻则 憎蚤贼澡 运鄄酝藻葬灶泽 葬灶凿 运赃晕晕 燥灶 酝燥增蚤灶早 糟葬贼藻早燥则赠院 渊 葬冤 葬灶早造藻 枣藻葬鄄 贼怎则藻曰 渊遭冤 则藻造葬贼蚤增藻 责燥泽蚤贼蚤燥灶 枣藻葬贼怎则藻 姿态描述 慢跑 跑步 走路 相对位置特征 园援苑苑 园援缘苑 园援怨猿 角度特征 园援愿园 园援远怨 园援怨园 摇 摇 实验结果如表 员 所示袁与相对位置特征相比袁角 度特征可以更好地区分不同尺度下的动作遥 但同 时袁这 圆 种特征袁与采用聚类算法生成标准姿态相 比袁本文方法中对每个部位独立构建特征并级联成 行为特征的策略可以有效降低计算复杂度袁且具有 更高的判别力遥 猿援源摇 本文方法与当前行为识别算法对比 实验当中还对 圆 种当前较为常用的分类器效果 进行对比院 杂灾酝 分类器和 杂燥枣贼皂葬曾 砸藻早则藻泽泽蚤燥灶 分类 器袁实验结果如图 缘 的混淆矩阵所示遥 其中袁 杂灾酝 分类器的动作识别的平均准确率达到 怨源援 怨豫袁而 杂燥枣贼皂葬曾 砸藻早则藻泽泽蚤燥灶 分类器的准确率为 愿缘援源豫遥 图 缘摇 运栽匀 数据集上识别效果的混淆矩阵 云蚤早援缘摇 悦燥灶枣怎泽蚤燥灶 皂葬贼则蚤糟藻泽 早藻灶藻则葬贼藻凿 遭赠 贼憎燥 糟造葬泽泽蚤枣蚤藻则泽 窑圆源窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 员园 卷