正在加载图片...
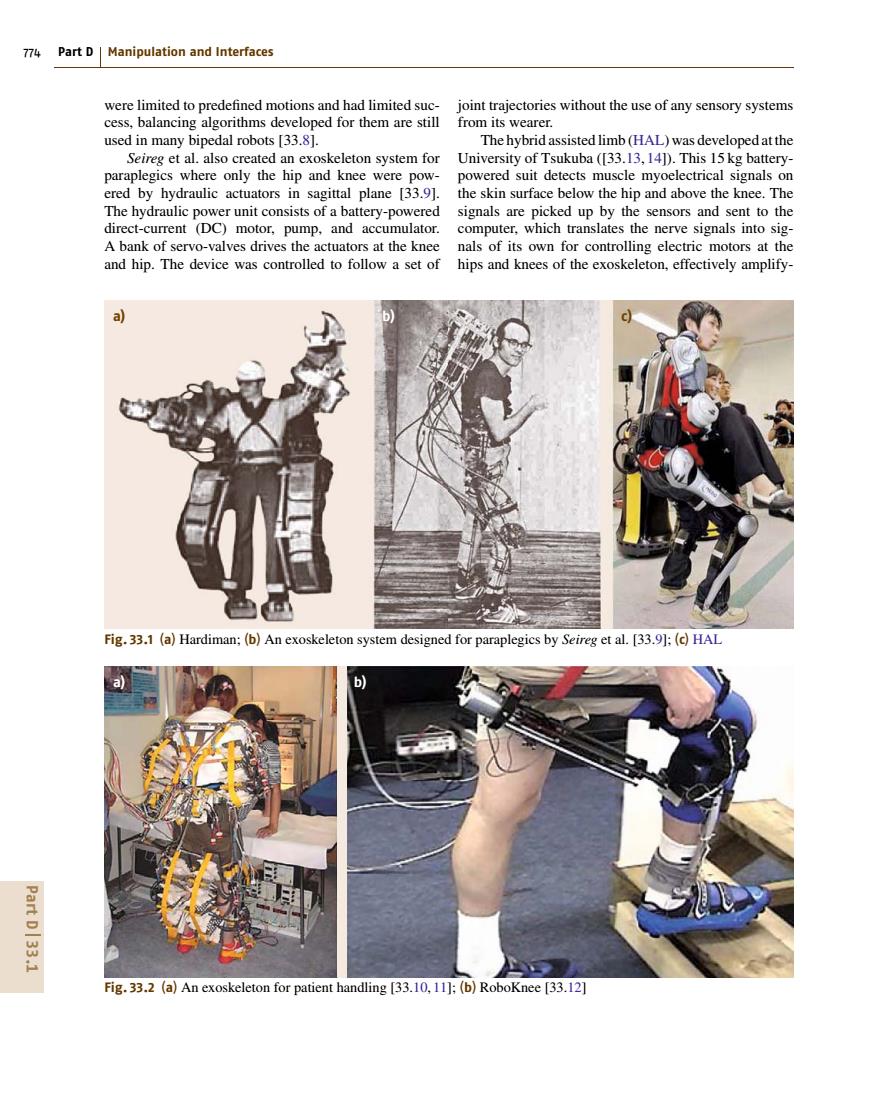
774 Part D Manipulation and Interfaces were limited to predefined motions and had limited suc-joint trajectories without the use of any sensory systems cess,balancing algorithms developed for them are still from its wearer. used in many bipedal robots [33.8]. The hybrid assisted limb(HAL)was developed at the Seireg et al.also created an exoskeleton system for University of Tsukuba ([33.13,141).This 15 kg battery- paraplegics where only the hip and knee were pow- powered suit detects muscle myoelectrical signals on ered by hydraulic actuators in sagittal plane [33.9]. the skin surface below the hip and above the knee.The The hydraulic power unit consists of a battery-powered signals are picked up by the sensors and sent to the direct-current (DC)motor,pump,and accumulator.computer,which translates the nerve signals into sig- A bank of servo-valves drives the actuators at the knee nals of its own for controlling electric motors at the and hip.The device was controlled to follow a set of hips and knees of the exoskeleton,effectively amplify- a Fig.33.1 (a)Hardiman;(b)An exoskeleton system designed for paraplegics by Seireg et al.[33.9]:(c)HAL Part D33.1 Fig.33.2 (a)An exoskeleton for patient handling [33.10,11];(b)RoboKnee [33.12]774 Part D Manipulation and Interfaces were limited to predefined motions and had limited success, balancing algorithms developed for them are still used in many bipedal robots [33.8]. Seireg et al. also created an exoskeleton system for paraplegics where only the hip and knee were powered by hydraulic actuators in sagittal plane [33.9]. The hydraulic power unit consists of a battery-powered direct-current (DC) motor, pump, and accumulator. A bank of servo-valves drives the actuators at the knee and hip. The device was controlled to follow a set of a) b) c) Fig. 33.1 (a) Hardiman; (b) An exoskeleton system designed for paraplegics by Seireg et al. [33.9]; (c) HAL a) b) Fig. 33.2 (a) An exoskeleton for patient handling [33.10, 11]; (b) RoboKnee [33.12] joint trajectories without the use of any sensory systems from its wearer. The hybrid assisted limb (HAL) was developed at the University of Tsukuba ([33.13,14]). This 15 kg batterypowered suit detects muscle myoelectrical signals on the skin surface below the hip and above the knee. The signals are picked up by the sensors and sent to the computer, which translates the nerve signals into signals of its own for controlling electric motors at the hips and knees of the exoskeleton, effectively amplifyPart D 33.1