正在加载图片...
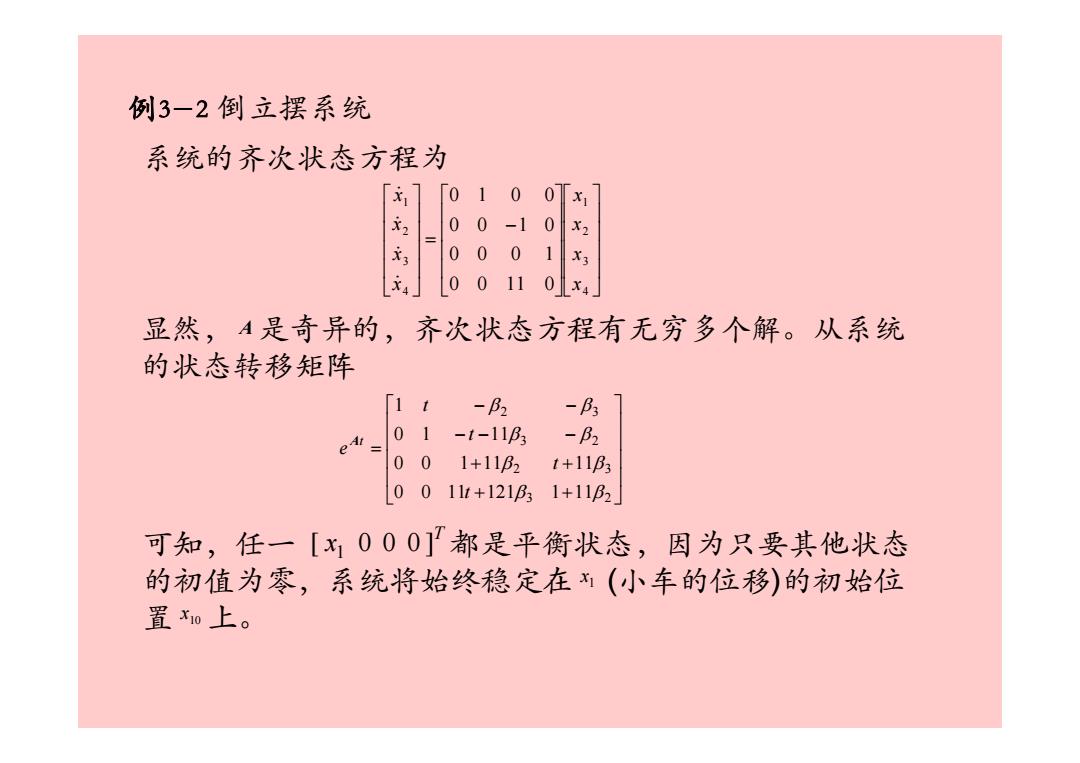
例3一2倒立摆系统 系统的齐次状态方程为 *7 1 0 2 0 0 -1 0 X2 0 0 0 1 0 0 11 0x4 显然,A是奇异的,齐次状态方程有无穷多个解。从系统 的状态转移矩阵 11 -B2 -B3 01 -1-11B3 -B2 00 1+11p2 1+11B3 0011+1213 1+11p2」 可知,任一[x1000]都是平衡状态,因为只要其他状态 的初值为零,系统将始终稳定在(小车的位移)的初始位 置x0上。例3-2 倒立摆系统 系统的齐次状态方程为 ⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡ − =⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡ 4321 4321 0 0 11 0 0 0 0 1 0 0 1 0 0 1 0 0 xxxx xxxx&&&& 显然, 是奇异的,齐次状态方程有无穷多个解。从系统 的状态转移矩阵 A ⎥⎥⎥⎥⎦⎤ ⎢⎢⎢⎢⎣⎡ + + + + − − − − − = 3 2 2 3 3 2 2 3 0 0 11 121 1 11 0 0 1 11 11 0 1 11 1 β β β β β β β β t t t t e At 可知,任一 都是平衡状态,因为只要其他状态 的初值为零,系统将始终稳定在 (小车的位移)的初始位 置 上。 10 x 1x T [ x 0 0 0 ] 1