正在加载图片...
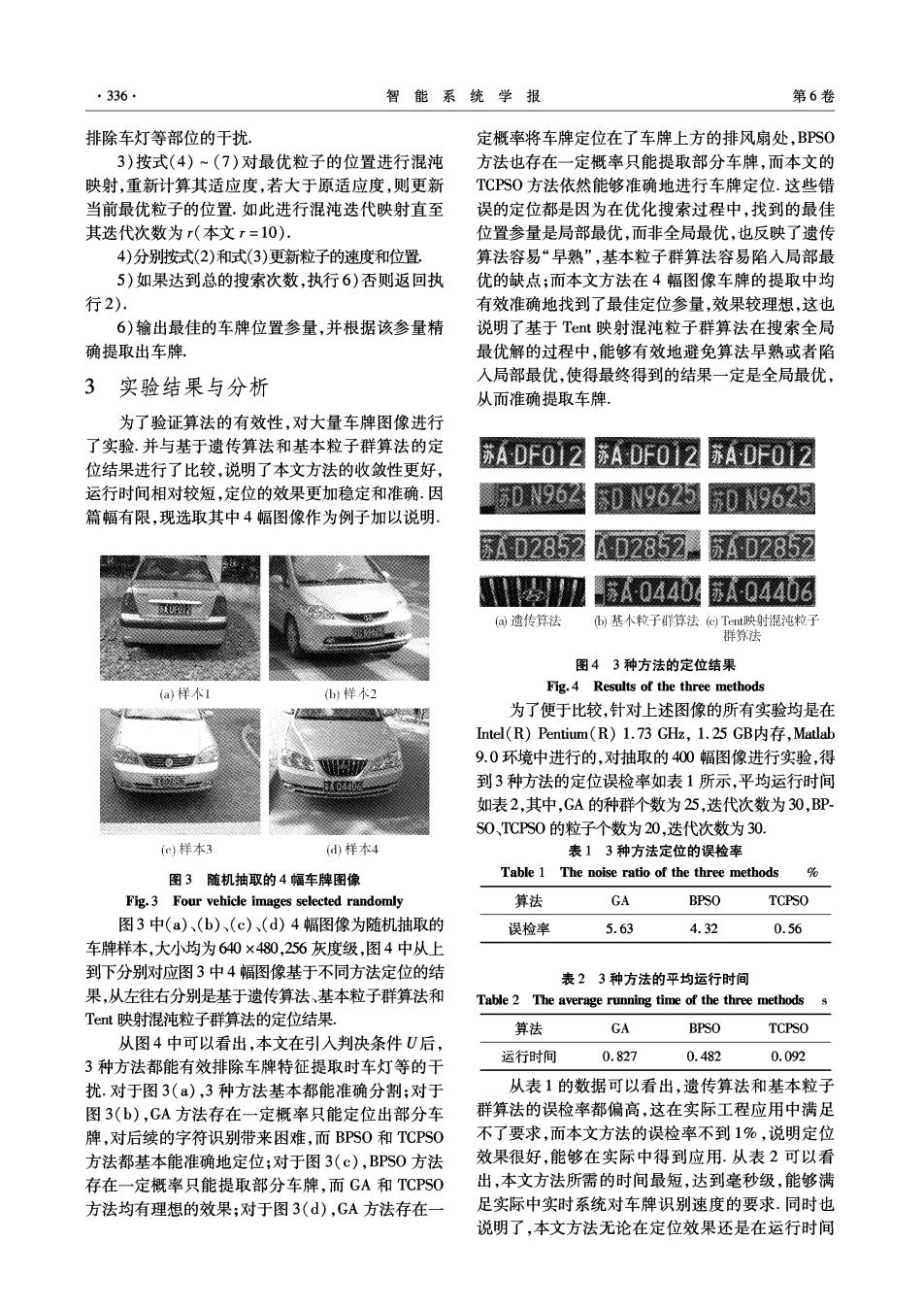
336 智能系统学报 第6卷 排除车灯等部位的干扰 定概率将车牌定位在了车牌上方的排风扇处,BPSO 3)按式(4)~(7)对最优粒子的位置进行混沌 方法也存在一定概率只能提取部分车牌,而本文的 映射,重新计算其适应度,若大于原适应度,则更新 TCPS0方法依然能够准确地进行车牌定位.这些错 当前最优粒子的位置.如此进行混沌迭代映射直至 误的定位都是因为在优化搜索过程中,找到的最佳 其迭代次数为r(本文r=10). 位置参量是局部最优,而非全局最优,也反映了遗传 4)分别按式(2)和式(3)更新粒子的速度和位置. 算法容易“早熟”,基本粒子群算法容易陷人局部最 5)如果达到总的搜索次数,执行6)否则返回执 优的缺点;而本文方法在4幅图像车牌的提取中均 行2). 有效准确地找到了最佳定位参量,效果较理想,这也 6)输出最佳的车牌位置参量,并根据该参量精 说明了基于Tent映射混沌粒子群算法在搜索全局 确提取出车牌 最优解的过程中,能够有效地避免算法早熟或者陷 3实验结果与分析 人局部最优,使得最终得到的结果一定是全局最优, 从而准确提取车牌。 为了验证算法的有效性,对大量车牌图像进行 了实验.并与基于遗传算法和基本粒子群算法的定 苏ADF012 A0F012 位结果进行了比较,说明了本文方法的收敛性更好, 泳ADF02 运行时间相对较短,定位的效果更加稳定和准确.因 9625 篇幅有限,现选取其中4幅图像作为例子加以说明, 苏A0440 苏A04406 (间遗传算法 b)基木粒子胙算法c)Tent映射混沌粒子 群算法 图43种方法的定位结果 (a)样木l b)样木2 Fig.4 Results of the three methods 为了便于比较,针对上述图像的所有实验均是在 ntel(R)Pentium(R)1.73GHz,1.25GB内存,Matlab 9.0环境中进行的,对抽取的400幅图像进行实验,得 到3种方法的定位误检率如表1所示,平均运行时间 如表2,其中,GA的种群个数为25,迭代次数为30,BP- S0、TCPS0的粒子个数为20,迭代次数为30. (c)样本3 (d)样本4 表13种方法定位的误检率 图3随机抽取的4幅车牌图像 Table 1 The noise ratio of the three methods % Fig.3 Four vehicle images selected randomly 算法 GA BPSO TCPSO 图3中(a)、(b)、(c)、(d)4幅图像为随机抽取的 误检率 5.63 4.32 0.56 车牌样本,大小均为640×480,256灰度级,图4中从上 到下分别对应图3中4幅图像基于不同方法定位的结 表23种方法的平均运行时间 果,从左往右分别是基于遗传算法、基本粒子群算法和 Table 2 The average running time of the three methods s Tent映射混沌粒子群算法的定位结果. 算法 GA BPSO TCPSO 从图4中可以看出,本文在引入判决条件U后, 运行时间 0.827 0.482 0.092 3种方法都能有效排除车牌特征提取时车灯等的干 扰.对于图3(a),3种方法基本都能准确分割;对于 从表1的数据可以看出,遗传算法和基本粒子 图3(b),GA方法存在一定概率只能定位出部分车 群算法的误检率都偏高,这在实际工程应用中满足 牌,对后续的字符识别带来困难,而BPS0和TCPS0 不了要求,而本文方法的误检率不到1%,说明定位 方法都基本能准确地定位:对于图3(c),BPS0方法 效果很好,能够在实际中得到应用.从表2可以看 存在一定概率只能提取部分车牌,而GA和TCPSO 出,本文方法所需的时间最短,达到毫秒级,能够满 方法均有理想的效果;对于图3(d),GA方法存在一 足实际中实时系统对车牌识别速度的要求.同时也 说明了,本文方法无论在定位效果还是在运行时间