正在加载图片...
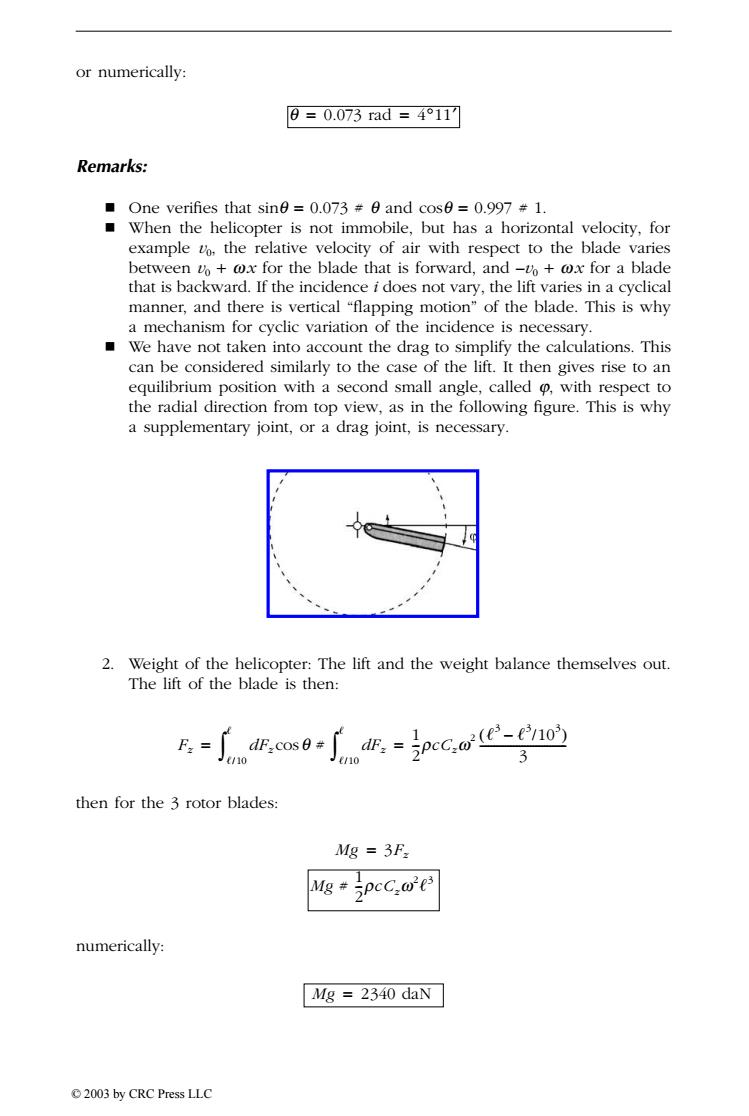
or numerically: 0=0.073rad=4117 Remarks: One verifies that sin=0.073 0 and cos=0.997 1. ■ When the helicopter is not immobile,but has a horizontal velocity,for example vo.the relative velocity of air with respect to the blade varies between vo wx for the blade that is forward,and -+ox for a blade that is backward.If the incidence i does not vary,the lift varies in a cyclical manner,and there is vertical "flapping motion"of the blade.This is why a mechanism for cyclic variation of the incidence is necessary. We have not taken into account the drag to simplify the calculations.This can be considered similarly to the case of the lift.It then gives rise to an equilibrium position with a second small angle,called o,with respect to the radial direction from top view,as in the following figure.This is why a supplementary joint,or a drag joint,is necessary. 2.Weight of the helicopter:The lift and the weight balance themselves out. The lift of the blade is then: F.-Se ,cos0dpecn t10 then for the 3 rotor blades: Mg 3F. Mg =pcC:o'es numerically: Mg 2340 daN 2003 by CRC Press LLCor numerically: Remarks: One verifies that sinq = 0.073 # q and cosq = 0.997 # 1. When the helicopter is not immobile, but has a horizontal velocity, for example v0, the relative velocity of air with respect to the blade varies between v0 + wx for the blade that is forward, and –v0 + wx for a blade that is backward. If the incidence i does not vary, the lift varies in a cyclical manner, and there is vertical “flapping motion” of the blade. This is why a mechanism for cyclic variation of the incidence is necessary. We have not taken into account the drag to simplify the calculations. This can be considered similarly to the case of the lift. It then gives rise to an equilibrium position with a second small angle, called j, with respect to the radial direction from top view, as in the following figure. This is why a supplementary joint, or a drag joint, is necessary. 2. Weight of the helicopter: The lift and the weight balance themselves out. The lift of the blade is then: then for the 3 rotor blades: numerically: q = = 0.073 rad 4∞11¢ Fz Fz q # dFz /10 Ú d cos /10 Ú 1 2 --rcCzw2 3 3 /103 ( ) – 3 = = ------------------------------- Mg = 3Fz Mg # 1 2 --rcCzw2 3 Mg = 2340 daN TX846_Frame_C18a Page 350 Monday, November 18, 2002 12:40 PM © 2003 by CRC Press LLC