正在加载图片...
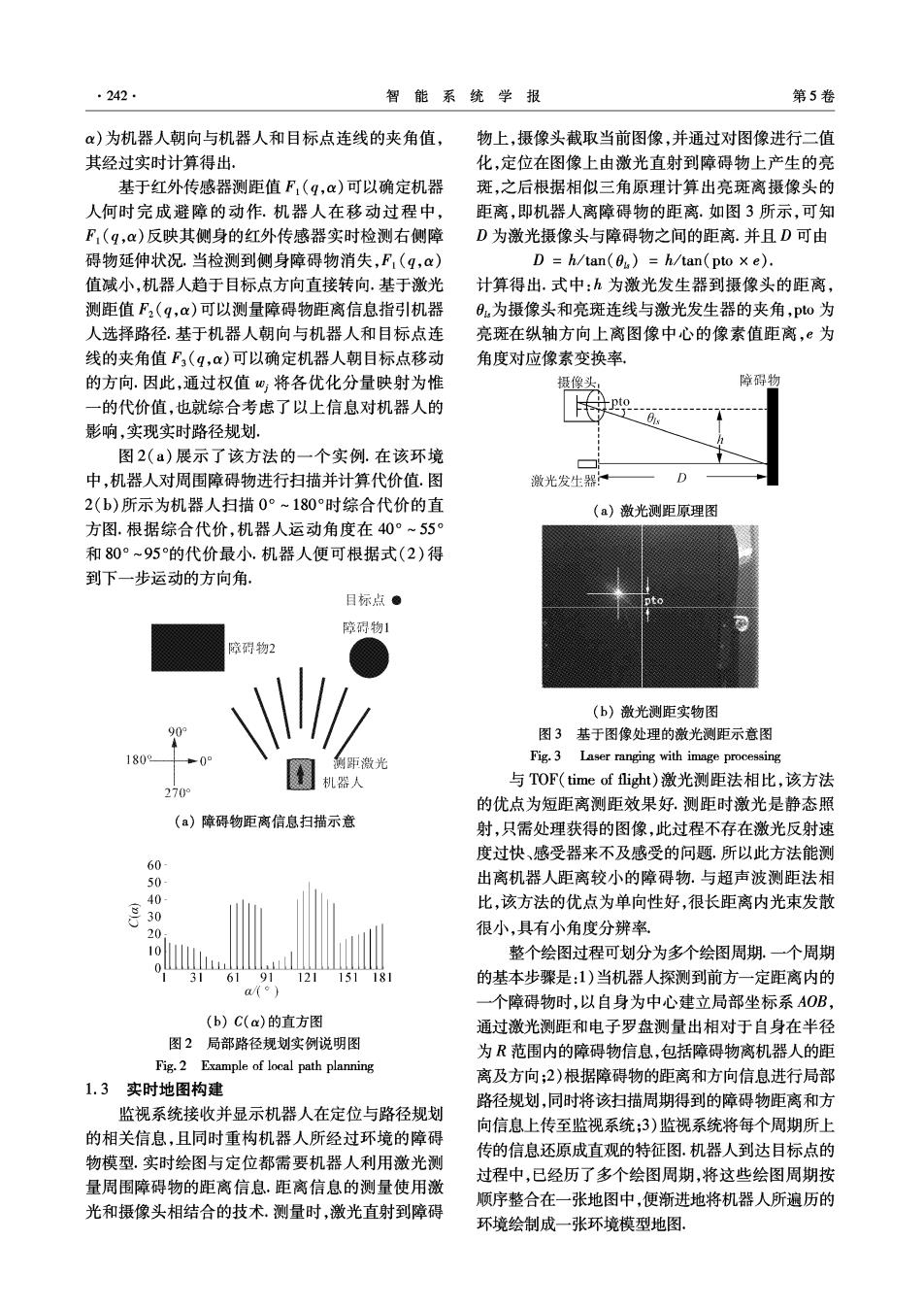
242. 智能系统学报 第5卷 α)为机器人朝向与机器人和目标点连线的夹角值, 物上,摄像头截取当前图像,并通过对图像进行二值 其经过实时计算得出。 化,定位在图像上由激光直射到障碍物上产生的亮 基于红外传感器测距值F,(q,α)可以确定机器 斑,之后根据相似三角原理计算出亮斑离摄像头的 人何时完成避障的动作.机器人在移动过程中, 距离,即机器人离障碍物的距离.如图3所示,可知 F,(q,α)反映其侧身的红外传感器实时检测右侧障 D为激光摄像头与障碍物之间的距离.并且D可由 碍物延伸状况.当检测到侧身障碍物消失,F,(q,α) D h/tan(0)h/tan(pto x e). 值减小,机器人趋于目标点方向直接转向,基于激光 计算得出.式中:h为激光发生器到摄像头的距离, 测距值F2(q,α)可以测量障碍物距离信息指引机器 8为摄像头和亮斑连线与激光发生器的夹角,pto为 人选择路径,基于机器人朝向与机器人和目标点连 亮斑在纵轴方向上离图像中心的像素值距离,©为 线的夹角值F3(q,)可以确定机器人朝目标点移动 角度对应像素变换率, 的方向.因此,通过权值w:将各优化分量映射为惟 摄像头 障碍物 的代价值,也就综合考虑了以上信息对机器人的 影响,实现实时路径规划. 图2(a)展示了该方法的一个实例.在该环境 中,机器人对周围障碍物进行扫描并计算代价值.图 激光发生器 D 2(b)所示为机器人扫描0°~180°时综合代价的直 (a)激光测距原理图 方图.根据综合代价,机器人运动角度在40°~55° 和80°~95的代价最小.机器人便可根据式(2)得 到下一步运动的方向角, 目标点● 障碍物1 障碍物2 (b)激光测距实物图 图3基于图像处理的激光测距示意图 180% 0 测距激光 Fig.3 Laser ranging with image processing 机器人 与TOF(time of flight)激光测距法相比,该方法 2709 的优点为短距离测距效果好.测距时激光是静态照 (a)障碍物距离信息扫描示意 射,只需处理获得的图像,此过程不存在激光反射速 度过快、感受器来不及感受的问题,所以此方法能测 60 50 出离机器人距离较小的障碍物.与超声波测距法相 0 恩0 比,该方法的优点为单向性好,很长距离内光束发散 20 很小,具有小角度分辨率 10 整个绘图过程可划分为多个绘图周期.一个周期 31 6191121151181 的基本步骤是:1)当机器人探测到前方一定距离内的 a/《o) 一个障碍物时,以自身为中心建立局部坐标系AOB, (b)C(a)的直方图 通过激光测距和电子罗盘测量出相对于自身在半径 图2局部路径规划实例说明图 为R范围内的障碍物信息,包括障碍物离机器人的距 Fig.2 Example of local path planning 离及方向;2)根据障碍物的距离和方向信息进行局部 1.3实时地图构建 路径规划,同时将该扫描周期得到的障碍物距离和方 监视系统接收并显示机器人在定位与路径规划 向信息上传至监视系统;3)监视系统将每个周期所上 的相关信息,且同时重构机器人所经过环境的障碍 传的信息还原成直观的特征图.机器人到达目标点的 物模型,实时绘图与定位都需要机器人利用激光测 过程中,已经历了多个绘图周期,将这些绘图周期按 量周围障碍物的距离信息,距离信息的测量使用激 顺序整合在一张地图中,便渐进地将机器人所遍历的 光和摄像头相结合的技术.测量时,激光直射到障碍 环境绘制成一张环境模型地图