正在加载图片...
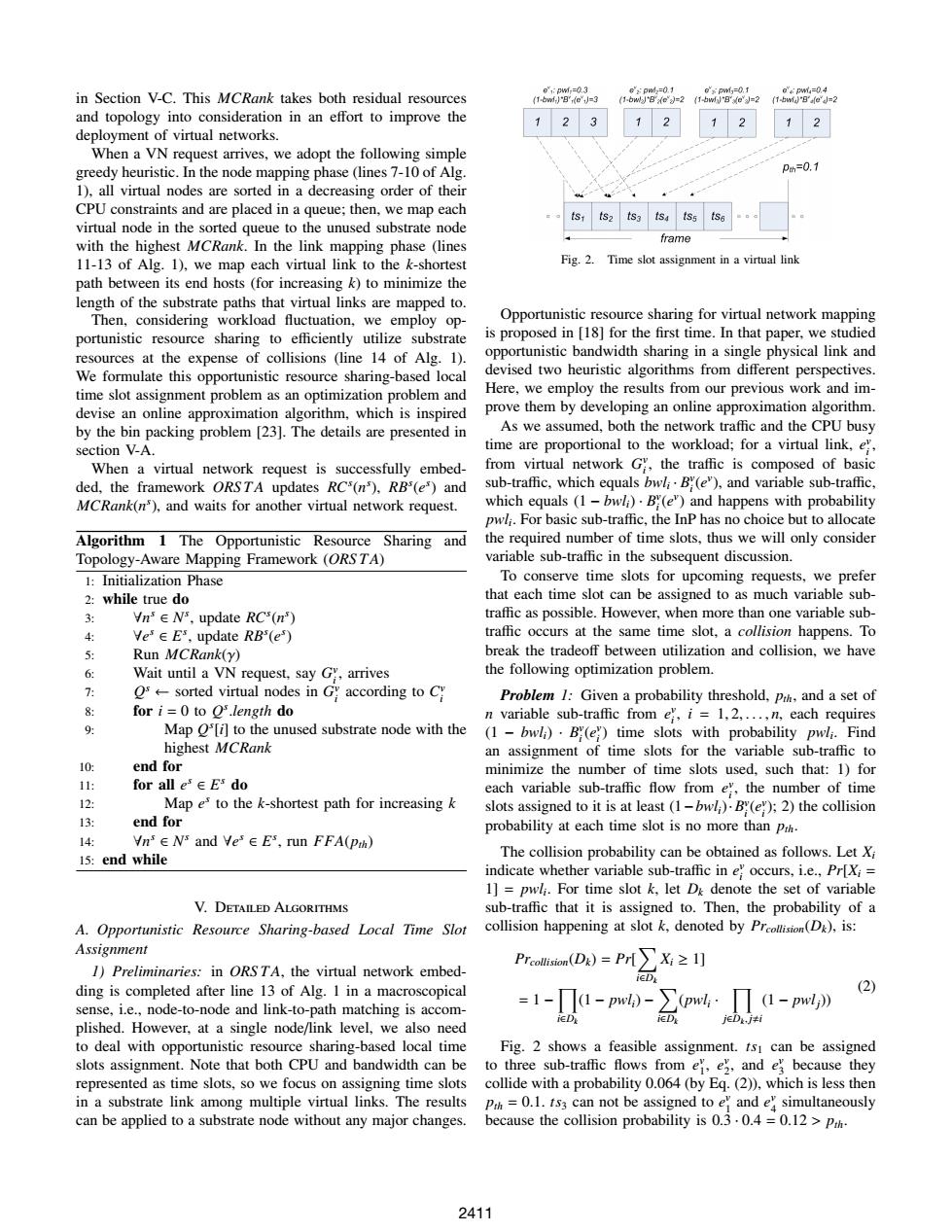
=01 in Section V-C.This MCRank takes both residual resources and topology into consideration in an effort to improve the 23 12 2 12 deployment of virtual networks. When a VN request arrives,we adopt the following simple greedy heuristic.In the node mapping phase(lines 7-10 of Alg. Ph=0.1 1),all virtual nodes are sorted in a decreasing order of their CPU constraints and are placed in a queue;then,we map each ts2 ts3 ts4 ts5 ts6 virtual node in the sorted queue to the unused substrate node with the highest MCRank.In the link mapping phase (lines frame 11-13 of Alg.1),we map each virtual link to the k-shortest Fig.2.Time slot assignment in a virtual link path between its end hosts (for increasing k)to minimize the length of the substrate paths that virtual links are mapped to. Then,considering workload fluctuation,we employ op- Opportunistic resource sharing for virtual network mapping portunistic resource sharing to efficiently utilize substrate is proposed in [18]for the first time.In that paper,we studied resources at the expense of collisions (line 14 of Alg.1). opportunistic bandwidth sharing in a single physical link and We formulate this opportunistic resource sharing-based local devised two heuristic algorithms from different perspectives. time slot assignment problem as an optimization problem and Here,we employ the results from our previous work and im- devise an online approximation algorithm,which is inspired prove them by developing an online approximation algorithm. by the bin packing problem [23].The details are presented in As we assumed,both the network traffic and the CPU busy section V-A. time are proportional to the workload;for a virtual link,e', When a virtual network request is successfully embed- from virtual network G',the traffic is composed of basic ded,the framework ORSTA updates RC5(n),RB(e)and sub-traffic,which equals bwli.B'(e"),and variable sub-traffic, MCRank(n),and waits for another virtual network request. which equals(1-bwli).B:(e")and happens with probability pwli.For basic sub-traffic,the InP has no choice but to allocate Algorithm 1 The Opportunistic Resource Sharing and the required number of time slots,thus we will only consider Topology-Aware Mapping Framework(ORS TA) variable sub-traffic in the subsequent discussion. 1:Initialization Phase To conserve time slots for upcoming requests,we prefer 2:while true do that each time slot can be assigned to as much variable sub- Yn'∈Ws,update RC'(n) traffic as possible.However,when more than one variable sub- Ye'∈E',update RB'(e) traffic occurs at the same time slot,a collision happens.To 5 Run MCRank(y) break the tradeoff between utilization and collision,we have Wait until a VN request,say G,arrives the following optimization problem. Os-sorted virtual nodes in Gy according to Cy Problem 1:Given a probability threshold,ph,and a set of for i=0 to Os.length do n variable sub-traffic from e',i =1.2,...,n,each requires 9 Map o[i]to the unused substrate node with the (1-bwli).B'(e")time slots with probability pwli.Find highest MCRank an assignment of time slots for the variable sub-traffic to 10: end for minimize the number of time slots used,such that:1)for 11: for all es e Es do each variable sub-traffic flow from e,the number of time 12: Map es to the k-shortest path for increasing k slots assigned to it is at least (1-bwl).B(e);2)the collision 13: end for probability at each time slot is no more than ph. 14 Yn∈Vs and Ve'∈E',run FFA(ph) 15:end while The collision probability can be obtained as follows.Let Xi indicate whether variable sub-traffic in e'occurs,i.e.,Pr[Xi= 1]pwli.For time slot k,let D&denote the set of variable V.DETAILED ALGORITHMS sub-traffic that it is assigned to.Then,the probability of a A.Opportunistic Resource Sharing-based Local Time Slot collision happening at slot k,denoted by Preollision(De),is: Assignment PTcollision(Dg)=PrL∑X≥1] 1)Preliminaries:in ORS TA.the virtual network embed- ding is completed after line 13 of Alg.I in a macroscopical sense,i.e.,node-to-node and link-to-path matching is accom- 1--pwl)-∑pw: (2) (1-pwlj)) jeD.j≠i plished.However,at a single node/link level,we also need to deal with opportunistic resource sharing-based local time Fig.2 shows a feasible assignment.ts can be assigned slots assignment.Note that both CPU and bandwidth can be to three sub-traffic flows from e',ez,and e because they represented as time slots,so we focus on assigning time slots collide with a probability 0.064 (by Eq.(2)),which is less then in a substrate link among multiple virtual links.The results ph=0.1.ts3 can not be assigned to e"and e simultaneously can be applied to a substrate node without any major changes. because the collision probability is 0.3.0.4=0.12>Ph 2411in Section V-C. This MCRank takes both residual resources and topology into consideration in an effort to improve the deployment of virtual networks. When a VN request arrives, we adopt the following simple greedy heuristic. In the node mapping phase (lines 7-10 of Alg. 1), all virtual nodes are sorted in a decreasing order of their CPU constraints and are placed in a queue; then, we map each virtual node in the sorted queue to the unused substrate node with the highest MCRank. In the link mapping phase (lines 11-13 of Alg. 1), we map each virtual link to the k-shortest path between its end hosts (for increasing k) to minimize the length of the substrate paths that virtual links are mapped to. Then, considering workload fluctuation, we employ opportunistic resource sharing to efficiently utilize substrate resources at the expense of collisions (line 14 of Alg. 1). We formulate this opportunistic resource sharing-based local time slot assignment problem as an optimization problem and devise an online approximation algorithm, which is inspired by the bin packing problem [23]. The details are presented in section V-A. When a virtual network request is successfully embedded, the framework ORS T A updates RCs (n s ), RBs (e s ) and MCRank(n s ), and waits for another virtual network request. Algorithm 1 The Opportunistic Resource Sharing and Topology-Aware Mapping Framework (ORS T A) 1: Initialization Phase 2: while true do 3: ∀n s ∈ N s , update RCs (n s ) 4: ∀e s ∈ E s , update RBs (e s ) 5: Run MCRank(γ) 6: Wait until a VN request, say G v i , arrives 7: Q s ← sorted virtual nodes in G v i according to C v i 8: for i = 0 to Q s .length do 9: Map Q s [i] to the unused substrate node with the highest MCRank 10: end for 11: for all e s ∈ E s do 12: Map e s to the k-shortest path for increasing k 13: end for 14: ∀n s ∈ N s and ∀e s ∈ E s , run FFA(pth) 15: end while V. Detailed Algorithms A. Opportunistic Resource Sharing-based Local Time Slot Assignment 1) Preliminaries: in ORS T A, the virtual network embedding is completed after line 13 of Alg. 1 in a macroscopical sense, i.e., node-to-node and link-to-path matching is accomplished. However, at a single node/link level, we also need to deal with opportunistic resource sharing-based local time slots assignment. Note that both CPU and bandwidth can be represented as time slots, so we focus on assigning time slots in a substrate link among multiple virtual links. The results can be applied to a substrate node without any major changes. Fig. 2. Time slot assignment in a virtual link Opportunistic resource sharing for virtual network mapping is proposed in [18] for the first time. In that paper, we studied opportunistic bandwidth sharing in a single physical link and devised two heuristic algorithms from different perspectives. Here, we employ the results from our previous work and improve them by developing an online approximation algorithm. As we assumed, both the network traffic and the CPU busy time are proportional to the workload; for a virtual link, e v i , from virtual network G v i , the traffic is composed of basic sub-traffic, which equals bwli · B v i (e v ), and variable sub-traffic, which equals (1 − bwli) · B v i (e v ) and happens with probability pwli . For basic sub-traffic, the InP has no choice but to allocate the required number of time slots, thus we will only consider variable sub-traffic in the subsequent discussion. To conserve time slots for upcoming requests, we prefer that each time slot can be assigned to as much variable subtraffic as possible. However, when more than one variable subtraffic occurs at the same time slot, a collision happens. To break the tradeoff between utilization and collision, we have the following optimization problem. Problem 1: Given a probability threshold, pth, and a set of n variable sub-traffic from e v i , i = 1, 2, . . . , n, each requires (1 − bwli) · B v i (e v i ) time slots with probability pwli . Find an assignment of time slots for the variable sub-traffic to minimize the number of time slots used, such that: 1) for each variable sub-traffic flow from e v i , the number of time slots assigned to it is at least (1−bwli)·B v i (e v i ); 2) the collision probability at each time slot is no more than pth. The collision probability can be obtained as follows. Let Xi indicate whether variable sub-traffic in e v i occurs, i.e., Pr[Xi = 1] = pwli . For time slot k, let Dk denote the set of variable sub-traffic that it is assigned to. Then, the probability of a collision happening at slot k, denoted by Prcollision(Dk), is: Prcollision(Dk) = Pr[ ∑ i∈Dk Xi ≥ 1] = 1 − ∏ i∈Dk (1 − pwli) − ∑ i∈Dk (pwli · ∏ j∈Dk , j,i (1 − pwlj)) (2) Fig. 2 shows a feasible assignment. ts1 can be assigned to three sub-traffic flows from e v 1 , e v 2 , and e v 3 because they collide with a probability 0.064 (by Eq. (2)), which is less then pth = 0.1. ts3 can not be assigned to e v 1 and e v 4 simultaneously because the collision probability is 0.3 · 0.4 = 0.12 > pth. 2411