正在加载图片...
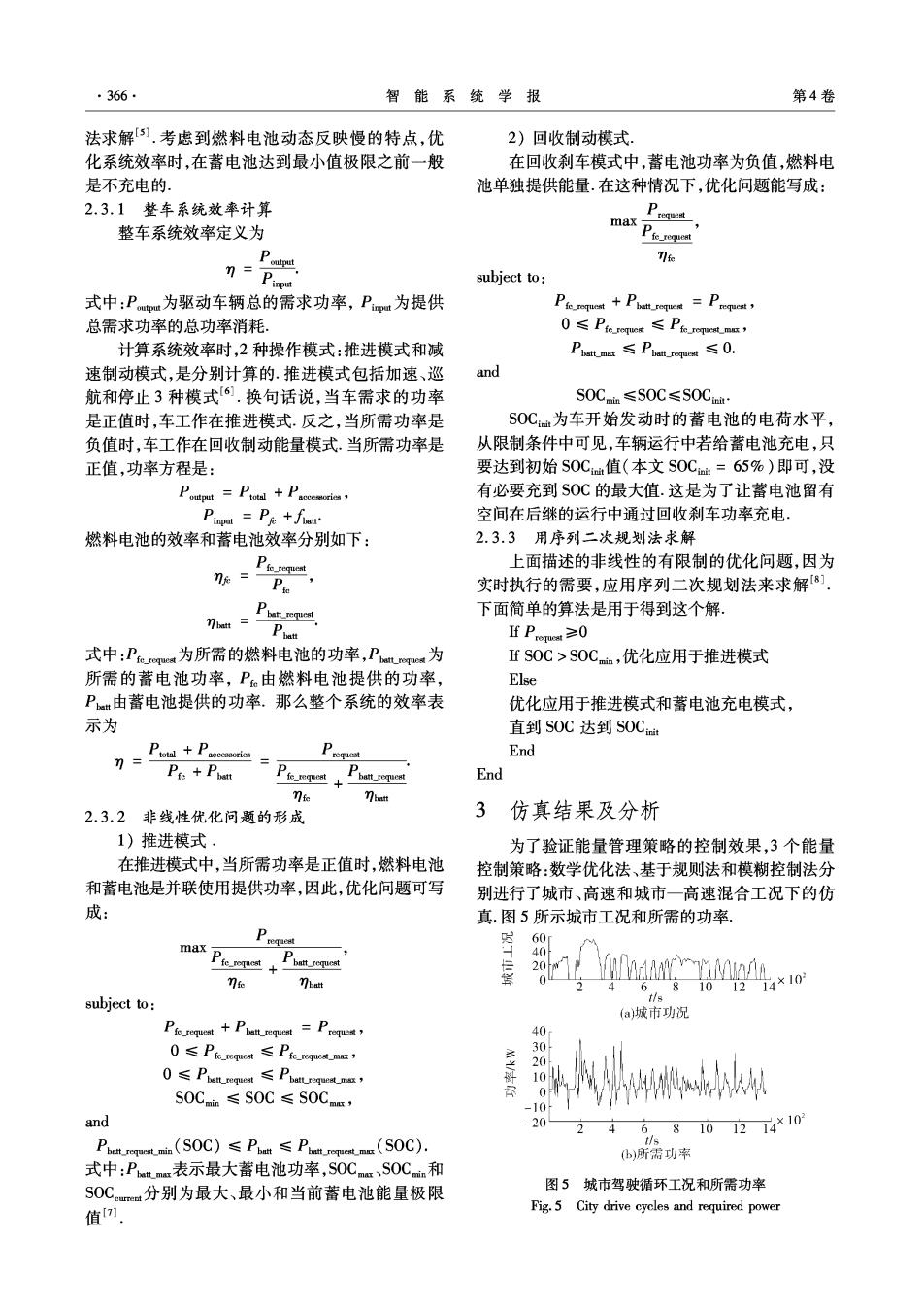
·366 智能系统学报 第4卷 法求解5].考虑到燃料电池动态反映慢的特点,优 2)回收制动模式 化系统效率时,在蓄电池达到最小值极限之前一般 在回收刹车模式中,蓄电池功率为负值,燃料电 是不充电的 池单独提供能量.在这种情况下,优化问题能写成: 2.3.1整车系统效率计算 P 整车系统效率定义为 max nfe nPinpt subject to: 式中:Pupm为驱动车辆总的需求功率,Ppm为提供 Psc_reTwont+Pbatt rompt=Proqpucnt 总需求功率的总功率消耗. 0≤Pew装≤Pm限r, 计算系统效率时,2种操作模式:推进模式和减 Phatt mat≤Pbet _ropcm≤0. 速制动模式,是分别计算的.推进模式包括加速、巡 and 航和停止3种模式6].换句话说,当车需求的功率 S0Cmta≤S0C≤SOCi. 是正值时,车工作在推进模式.反之,当所需功率是 S0C为车开始发动时的蓄电池的电荷水平, 负值时,车工作在回收制动能量模式.当所需功率是 从限制条件中可见,车辆运行中若给蓄电池充电,只 正值,功率方程是: 要达到初始S0Cm值(本文S0C=65%)即可,没 Poutpnt=Ptotal Paccemoie 有必要充到S0C的最大值.这是为了让蓄电池留有 Picpt=Pe+far… 空间在后继的运行中通过回收刹车功率充电. 燃料电池的效率和蓄电池效率分别如下: 2.3.3用序列二次规划法求解 Pferequest 上面描述的非线性的有限制的优化问题,因为 ne= 实时执行的需要,应用序列二次规划法来求解8] mbatt= Pbatt reucnt 下面简单的算法是用于得到这个解。 Pbatt fP≥0 式中:P。ma为所需的燃料电池的功率,Pam为 fSOC>SOCa,优化应用于推进模式 所需的蓄电池功率,P。由燃料电池提供的功率, Else P由蓄电池提供的功率.那么整个系统的效率表 优化应用于推进模式和蓄电池充电模式, 示为 直到S0C达到SOCt Protd Pc P End Pie Pbastt Pp十 End nfe 2.3.2非线性优化问题的形成 3 仿真结果及分析 1)推进模式. 为了验证能量管理策略的控制效果,3个能量 在推进模式中,当所需功率是正值时,燃料电池 控制策略:数学优化法、基于规则法和模糊控制法分 和蓄电池是并联使用提供功率,因此,优化问题可写 别进行了城市、高速和城市一高速混合工况下的仿 成: 真.图5所示城市工况和所需的功率. P 60r max- feromu时十 40 7 mbatt 24 6,a8101214×10 t/s subject to: (a)城市功况 PorPlan m=Preee 40 0≤Pepa≤Per, 30 20 0≤Pha≤Prog, 10 S0Cmia≤S0C≤SOC, -10 and -20 24 6.8101214×101 Phetromin(S0C)≤Pam≤Pogom=(S0C). (b)所需功案 式中:Phbait ma表示最大蓄电池功率,SOC、SOC和 SOC分别为最大、最小和当前蓄电池能量极限 图5城市驾驶循环工况和所需功率 值. Fig.5 City drive cycles and required power