正在加载图片...
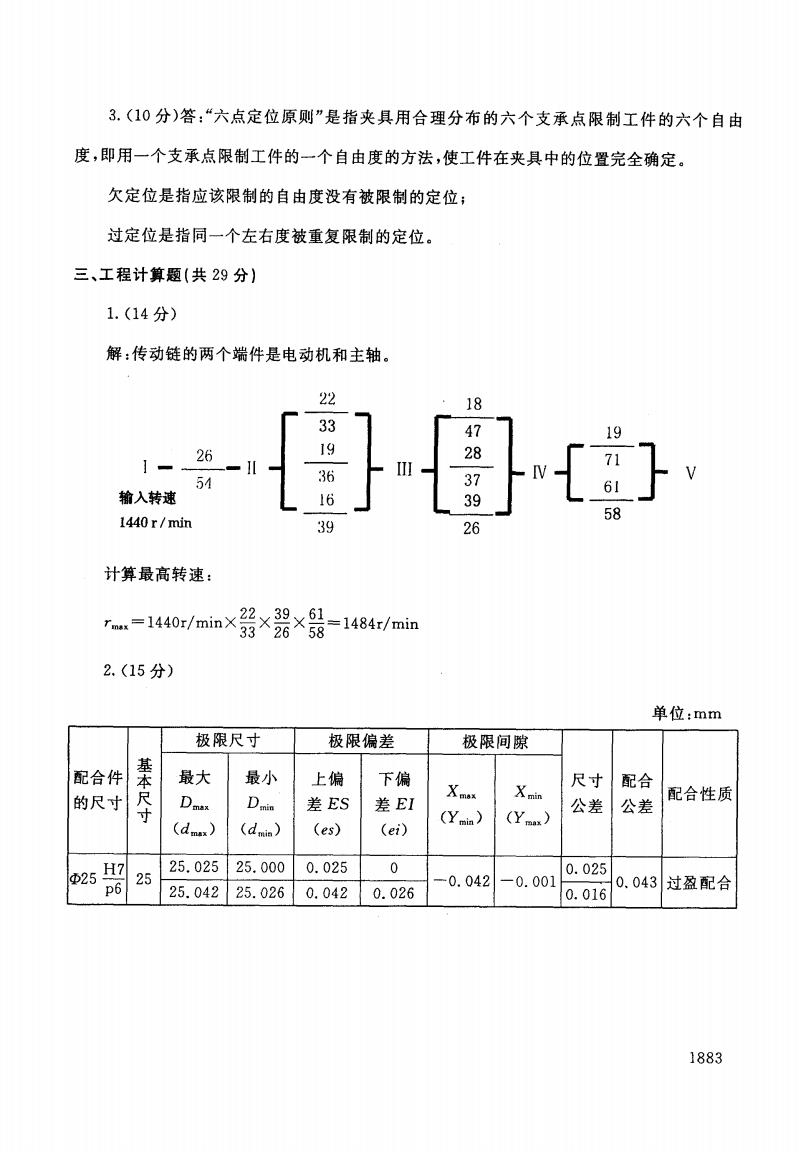
3.(10分)答:“六点定位原则”是指夹具用合理分布的六个支承点限制工件的六个自由 度,即用一个支承点限制工件的一个自由度的方法,使工件在夹具中的位置完全确定。 欠定位是指应该限制的自由度没有被限制的定位; 过定位是指同一个左右度被重复限制的定位。 三、工程计算题(共29分) 1.(14分) 解:传动链的两个端件是电动机和主轴。 22 18 33 47 19 26 28 1- 51 36 输入转速 39 58 1440 r/min 39 26 计算最高转速: rmx=1440r/min 22×39×1=1484r/min 3326^58 2.(15分) 单位:mm 极限尺寸 极限偏差 极限间隙 配合件 基本尺寸 最大 最小 上偏 下偏 尺寸 配合 的尺寸 Dx Dnin 差ES 差EI X.max X min 配合性质 (dnx) (dmin) (Ymin) (Yn) 公差 公差 (es) (ei) Φ25H7 25.025 25.000 0.025 0 0.025 P6 25 0.042 -0.001 0.043 25.042 25.026 0.042 0.026 过盈配合 0.016 18833. (10分)答:“六点定位原则”是指夹具用合理分布的六个支承点限制工件的六个自由 度,即用一个支承点限制工件的一个自由度的方法,使工件在夹具中的位置完全确定。 欠定位是指应该限制的自由度没有被限制的定位 ; 过定位是指同一个左右度被重复限制的定位。 三、工程计算题(共 29分) 1. < 14分) 解:传动链的两个端件是电动机和主轴。 峥‘ OU 一 ,了 q ︺ 一 户0 d 二 勺乙 一 。J CO 一 Q‘ 1- 输人转速 26 5理 440 r / min 计算最高转速: _ ,J‘。 , .、,22、,39、 61 r'n,ax - 144 V I/ min x丽x丽x丽“142S4r/ min 2. (15分) 单位 :mm 配合件 的尺寸 基 本 尺 寸 极限尺寸 极限偏差 极 限间隙 尺寸 公差 配合 公差 配合性质 最大 Dmax <dmax ) 最小 Dm,} +min ) 上偏 差 ES (es) 下偏 差 EI (ei) Xmax <Ymin) Xmin +'max ) _,_H7 甲L5 一下了 PO 25 25. 025 25. 000 0. 025 0 一0. 042 一 0. 001 0. 025 0, 043 过盈配合 25. 042 25. 026 0. 042 0. 026 0. 016 1883