正在加载图片...
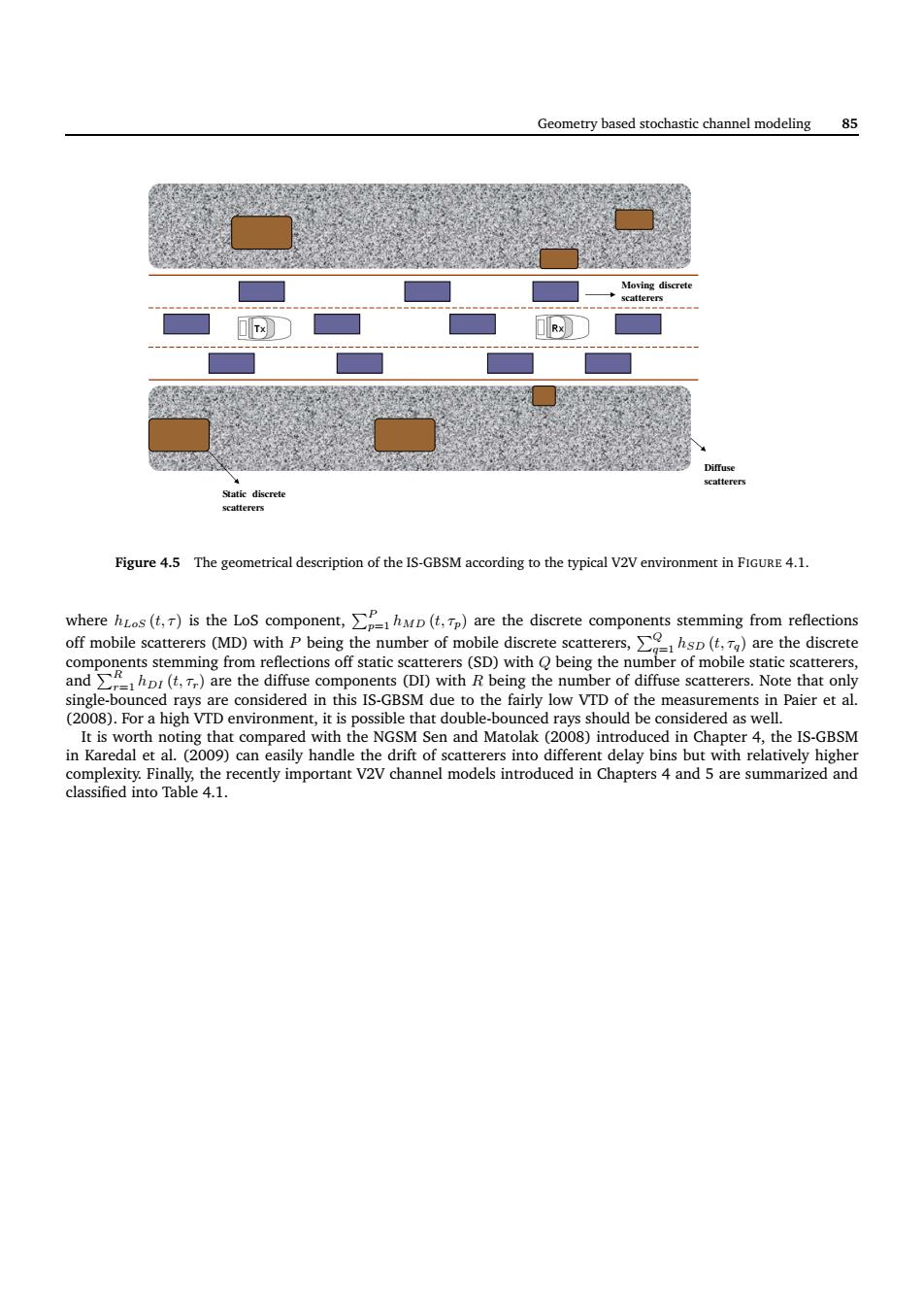
Geometry based stochastic channel modeling 85 Figure 4.5 The geometrical description of the IS-GBSM according to the typical V2V environment in FIGURE 4.1 where hLs(,化r)is the LoS component,,∑1hMD(亿,n)are the discrete components stemming from reflections off mobile scatterers(MD)with Pbeing the number of mobile disc crere,∑hsp(.)are the discret 2 ).For a high V ered as we IS CRSNGeometry based stochastic channel modeling 85 Static discrete scatterers Moving discrete scatterers Moving trucks Diffuse scatterers Figure 4.5 The geometrical description of the IS-GBSM according to the typical V2V environment in FIGURE 4.1. where hLoS (t, τ) is the LoS component, PP p=1 hMD (t, τp) are the discrete components stemming from reflections off mobile scatterers (MD) with P being the number of mobile discrete scatterers, PQ q=1 hSD (t, τq) are the discrete components stemming from reflections off static scatterers (SD) with Q being the number of mobile static scatterers, and PR r=1 hDI (t, τr) are the diffuse components (DI) with R being the number of diffuse scatterers. Note that only single-bounced rays are considered in this IS-GBSM due to the fairly low VTD of the measurements in Paier et al. (2008). For a high VTD environment, it is possible that double-bounced rays should be considered as well. It is worth noting that compared with the NGSM Sen and Matolak (2008) introduced in Chapter 4, the IS-GBSM in Karedal et al. (2009) can easily handle the drift of scatterers into different delay bins but with relatively higher complexity. Finally, the recently important V2V channel models introduced in Chapters 4 and 5 are summarized and classified into Table 4.1