正在加载图片...
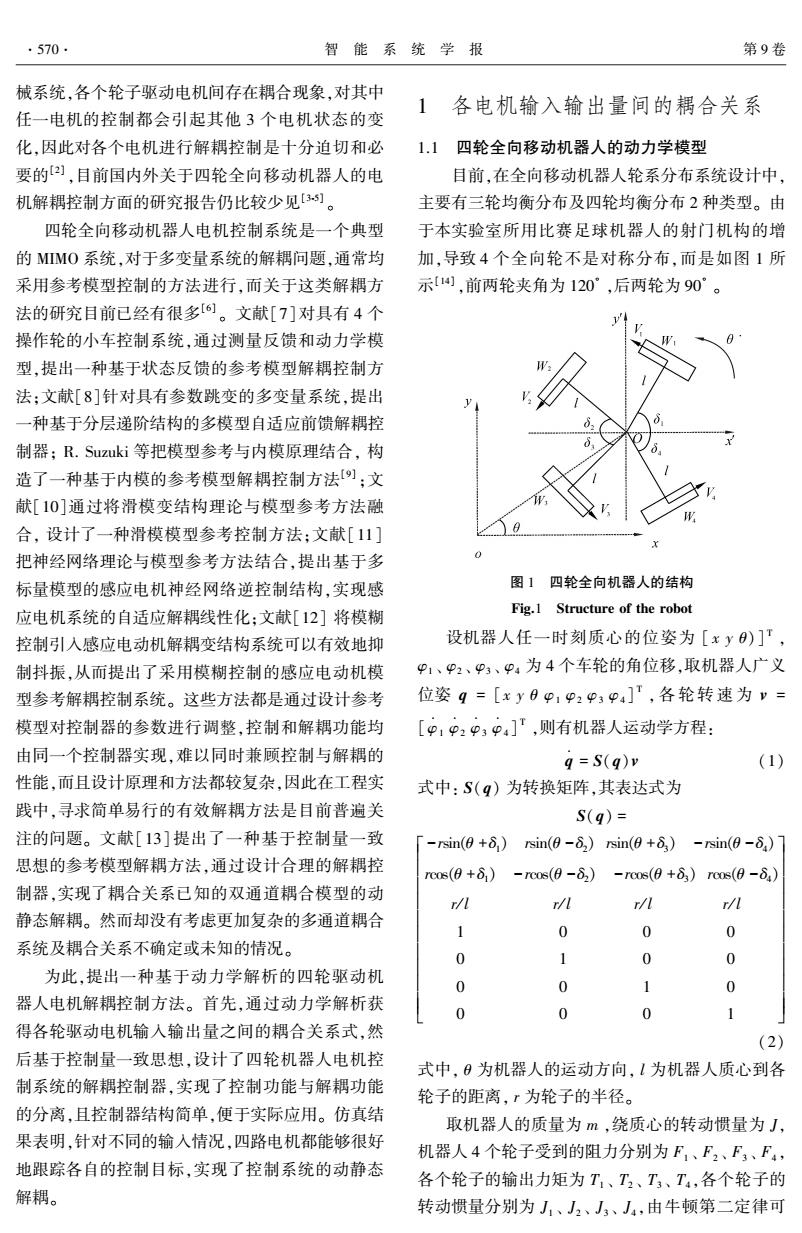
·570· 智能系统学报 第9卷 械系统,各个轮子驱动电机间存在耦合现象,对其中 1各电机输入输出量间的耦合关系 任一电机的控制都会引起其他3个电机状态的变 化,因此对各个电机进行解耦控制是十分迫切和必 1.1四轮全向移动机器人的动力学模型 要的[],目前国内外关于四轮全向移动机器人的电 目前,在全向移动机器人轮系分布系统设计中, 机解耦控制方面的研究报告仍比较少见3)]。 主要有三轮均衡分布及四轮均衡分布2种类型。由 四轮全向移动机器人电机控制系统是一个典型 于本实验室所用比赛足球机器人的射门机构的增 的MIMO系统,对于多变量系统的解耦问题,通常均 加,导致4个全向轮不是对称分布,而是如图1所 采用参考模型控制的方法进行,而关于这类解耦方 示114,前两轮夹角为120°,后两轮为90°。 法的研究目前已经有很多6。文献[7]对具有4个 操作轮的小车控制系统,通过测量反馈和动力学模 型,提出一种基于状态反馈的参考模型解耦控制方 法:文献[8]针对具有参数跳变的多变量系统,提出 一种基于分层递阶结构的多模型自适应前馈解耦控 制器;R.Suzuki等把模型参考与内模原理结合,构 造了一种基于内模的参考模型解耦控制方法[):文 献[10]通过将滑模变结构理论与模型参考方法融 合,设计了一种滑模模型参考控制方法;文献[11] 把神经网络理论与模型参考方法结合,提出基于多 标量模型的感应电机神经网络逆控制结构,实现感 图1四轮全向机器人的结构 应电机系统的自适应解耦线性化:文献[12]将模糊 Fig.1 Structure of the robot 控制引入感应电动机解耦变结构系统可以有效地抑 设机器人任一时刻质心的位姿为[xy)]T, 制抖振,从而提出了采用模糊控制的感应电动机模 P1、P2、P3、中:为4个车轮的角位移,取机器人广义 型参考解耦控制系统。这些方法都是通过设计参考 位姿q=[xy0p1P2pp4]T,各轮转速为y= 模型对控制器的参数进行调整,控制和解耦功能均 [P192中3中4]「,则有机器人运动学方程: 由同一个控制器实现,难以同时兼顾控制与解耦的 q=S(q)v (1) 性能,而且设计原理和方法都较复杂,因此在工程实 式中:S(q)为转换矩阵,其表达式为 践中,寻求简单易行的有效解耦方法是目前普遍关 S(q)= 注的问题。文献[13]提出了一种基于控制量一致 [-sin(0+δ,)sin(0-8,)sin(0+d)-sin(0-6,)1 思想的参考模型解耦方法,通过设计合理的解耦控 rc0s(0+81) -c0s(0-6)-c0s(0+8)Tc0s(0-64) 制器,实现了耦合关系已知的双通道耦合模型的动 r/l r/l r/l r/l 静态解耦。然而却没有考虑更加复杂的多通道耦合 0 0 0 系统及耦合关系不确定或未知的情况。 0 1 0 0 为此,提出一种基于动力学解析的四轮驱动机 0 0 1 0 器人电机解耦控制方法。首先,通过动力学解析获 0 0 得各轮驱动电机输入输出量之间的耦合关系式,然 (2) 后基于控制量一致思想,设计了四轮机器人电机控 式中,0为机器人的运动方向,1为机器人质心到各 制系统的解耦控制器,实现了控制功能与解耦功能 轮子的距离,r为轮子的半径。 的分离,且控制器结构简单,便于实际应用。仿真结 取机器人的质量为m,绕质心的转动惯量为J, 果表明,针对不同的输入情况,四路电机都能够很好 机器人4个轮子受到的阻力分别为F1、F2、F,、F4, 地跟踪各自的控制目标,实现了控制系统的动静态 各个轮子的输出力矩为T:、T2、T3、T4,各个轮子的 解耦。 转动惯量分别为J1、J2、J3、J4,由牛顿第二定律可械系统,各个轮子驱动电机间存在耦合现象,对其中 任一电机的控制都会引起其他 3 个电机状态的变 化,因此对各个电机进行解耦控制是十分迫切和必 要的[2] ,目前国内外关于四轮全向移动机器人的电 机解耦控制方面的研究报告仍比较少见[3⁃5] 。 四轮全向移动机器人电机控制系统是一个典型 的 MIMO 系统,对于多变量系统的解耦问题,通常均 采用参考模型控制的方法进行,而关于这类解耦方 法的研究目前已经有很多[6] 。 文献[7]对具有 4 个 操作轮的小车控制系统,通过测量反馈和动力学模 型,提出一种基于状态反馈的参考模型解耦控制方 法;文献[8]针对具有参数跳变的多变量系统,提出 一种基于分层递阶结构的多模型自适应前馈解耦控 制器; R. Suzuki 等把模型参考与内模原理结合, 构 造了一种基于内模的参考模型解耦控制方法[9] ;文 献[10]通过将滑模变结构理论与模型参考方法融 合, 设计了一种滑模模型参考控制方法;文献[11] 把神经网络理论与模型参考方法结合,提出基于多 标量模型的感应电机神经网络逆控制结构,实现感 应电机系统的自适应解耦线性化;文献[12] 将模糊 控制引入感应电动机解耦变结构系统可以有效地抑 制抖振,从而提出了采用模糊控制的感应电动机模 型参考解耦控制系统。 这些方法都是通过设计参考 模型对控制器的参数进行调整,控制和解耦功能均 由同一个控制器实现,难以同时兼顾控制与解耦的 性能,而且设计原理和方法都较复杂,因此在工程实 践中,寻求简单易行的有效解耦方法是目前普遍关 注的问题。 文献[13]提出了一种基于控制量一致 思想的参考模型解耦方法,通过设计合理的解耦控 制器,实现了耦合关系已知的双通道耦合模型的动 静态解耦。 然而却没有考虑更加复杂的多通道耦合 系统及耦合关系不确定或未知的情况。 为此,提出一种基于动力学解析的四轮驱动机 器人电机解耦控制方法。 首先,通过动力学解析获 得各轮驱动电机输入输出量之间的耦合关系式,然 后基于控制量一致思想,设计了四轮机器人电机控 制系统的解耦控制器,实现了控制功能与解耦功能 的分离,且控制器结构简单,便于实际应用。 仿真结 果表明,针对不同的输入情况,四路电机都能够很好 地跟踪各自的控制目标,实现了控制系统的动静态 解耦。 1 各电机输入输出量间的耦合关系 1.1 四轮全向移动机器人的动力学模型 目前,在全向移动机器人轮系分布系统设计中, 主要有三轮均衡分布及四轮均衡分布 2 种类型。 由 于本实验室所用比赛足球机器人的射门机构的增 加,导致 4 个全向轮不是对称分布,而是如图 1 所 示[14] ,前两轮夹角为 120 ° ,后两轮为 90 ° 。 图 1 四轮全向机器人的结构 Fig.1 Structure of the robot 设机器人任一时刻质心的位姿为 [ x y θ)] T , φ1 、 φ2 、 φ3 、 φ4 为 4 个车轮的角位移,取机器人广义 位姿 q = [x y θ φ1 φ2 φ3 φ4 ] T , 各 轮 转 速 为 v = [φ · 1 φ · 2 φ · 3 φ · 4 ] T ,则有机器人运动学方程: q · = S(q)v (1) 式中: S(q) 为转换矩阵,其表达式为 S(q) = -rsin(θ +δ1) rsin(θ -δ2) rsin(θ +δ3) -rsin(θ -δ4) rcos(θ +δ1) -rcos(θ -δ2) -rcos(θ +δ3) rcos(θ -δ4) r/ l r/ l r/ l r/ l 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 é ë ê ê ê ê ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú ú ú ú ú (2) 式中, θ 为机器人的运动方向, l 为机器人质心到各 轮子的距离, r 为轮子的半径。 取机器人的质量为 m ,绕质心的转动惯量为 J, 机器人 4 个轮子受到的阻力分别为 F1 、 F2 、 F3 、 F4 , 各个轮子的输出力矩为 T1 、 T2 、 T3 、 T4 ,各个轮子的 转动惯量分别为 J1 、 J2 、 J3 、 J4 ,由牛顿第二定律可 ·570· 智 能 系 统 学 报 第 9 卷