正在加载图片...
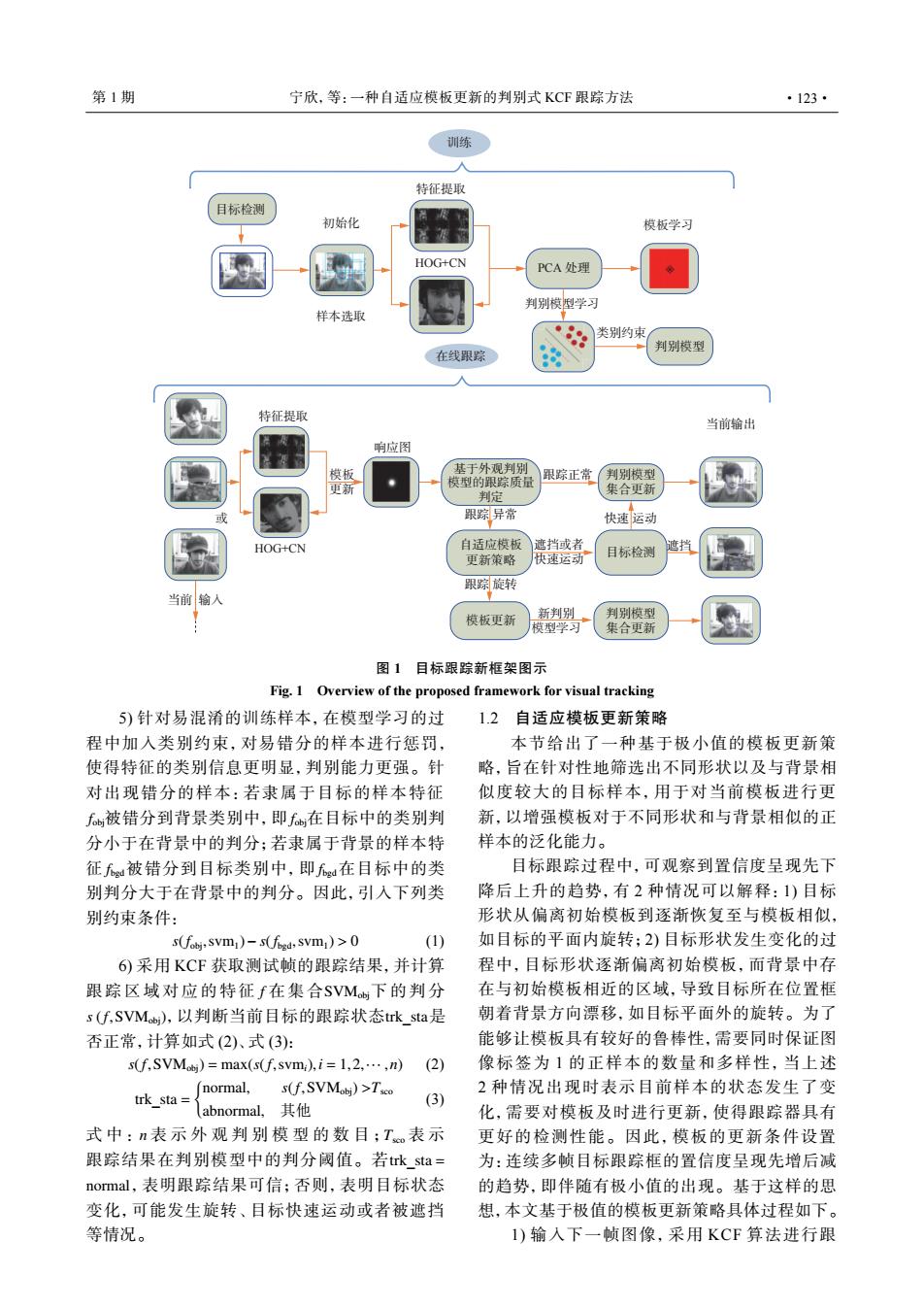
第1期 宁欣,等:一种自适应模板更新的判别式KC℉跟踪方法 ·123· 训练 A 特征提取 目标检测 初始化 法展 模板学习 HOG+CN PCA处理 判别模型学习 样本选取 类别约束 判别模型 在线跟踪 特征提取 当前输出 响应图 模板 基于外观判别 跟踪正常 判别模型 更新 模型的跟踪质量 判定 集合更新 跟踪异常 快速运动 HOG+CN 自适应模板 遮挡或者 更新策略 快速运动 目标检测 跟踪旋转 当前 模板更新 新判别 判别模型 模型学习 集合更新 图1目标跟踪新框架图示 Fig.1 Overview of the proposed framework for visual tracking 5)针对易混淆的训练样本,在模型学习的过 1.2 自适应模板更新策略 程中加入类别约束,对易错分的样本进行惩罚, 本节给出了一种基于极小值的模板更新策 使得特征的类别信息更明显,判别能力更强。针 略,旨在针对性地筛选出不同形状以及与背景相 对出现错分的样本:若隶属于目标的样本特征 似度较大的目标样本,用于对当前模板进行更 f被错分到背景类别中,即f,在目标中的类别判 新,以增强模板对于不同形状和与背景相似的正 分小于在背景中的判分;若隶属于背景的样本特 样本的泛化能力。 征无被错分到目标类别中,即无ea在目标中的类 目标跟踪过程中,可观察到置信度呈现先下 别判分大于在背景中的判分。因此,引入下列类 降后上升的趋势,有2种情况可以解释:1)目标 别约束条件: 形状从偏离初始模板到逐渐恢复至与模板相似, s(foj.svm)-s(fid,svm)>0 (1) 如目标的平面内旋转;2)目标形状发生变化的过 6)采用KC℉获取测试帧的跟踪结果,并计算 程中,目标形状逐渐偏离初始模板,而背景中存 跟踪区域对应的特征f在集合SVM下的判分 在与初始模板相近的区域,导致目标所在位置框 s(f,SVMb),以判断当前目标的跟踪状态trk sta是 朝着背景方向漂移,如目标平面外的旋转。为了 否正常,计算如式(2)、式(3): 能够让模板具有较好的鲁棒性,需要同时保证图 s(f,SVMbi)=max(s(f,svm),i=1,2,....n) (2) 像标签为1的正样本的数量和多样性,当上述 (normal,s(f,SVMobj)>Tsco 2种情况出现时表示目前样本的状态发生了变 trk_sta= (3) abnormal,.其他 化,需要对模板及时进行更新,使得跟踪器具有 式中:n表示外观判别模型的数目;T表示 更好的检测性能。因此,模板的更新条件设置 跟踪结果在判别模型中的判分阈值。若trk sta= 为:连续多帧目标跟踪框的置信度呈现先增后减 normal,.表明跟踪结果可信;否则,表明目标状态 的趋势,即伴随有极小值的出现。基于这样的思 变化,可能发生旋转、目标快速运动或者被遮挡 想,本文基于极值的模板更新策略具体过程如下。 等情况。 1)输入下一帧图像,采用KCF算法进行跟fobj fobj fbgd fbgd 5) 针对易混淆的训练样本,在模型学习的过 程中加入类别约束,对易错分的样本进行惩罚, 使得特征的类别信息更明显,判别能力更强。针 对出现错分的样本:若隶属于目标的样本特征 被错分到背景类别中,即 在目标中的类别判 分小于在背景中的判分;若隶属于背景的样本特 征 被错分到目标类别中,即 在目标中的类 别判分大于在背景中的判分。因此,引入下列类 别约束条件: s(fobj,svm1)− s(fbgd,svm1) > 0 (1) f SVMobj s (f,SVMobj) trk_sta 6) 采用 KCF 获取测试帧的跟踪结果,并计算 跟踪区域对应的特征 在集合 下的判分 ,以判断当前目标的跟踪状态 是 否正常,计算如式 (2)、式 (3): s(f,SVMobj) = max(s(f,svmi),i = 1,2,··· ,n) (2) trk_sta = { normal, s(f,SVMobj) >Tsco abnormal, 其他 (3) n Tsco trk_sta = normal 式中: 表示外观判别模型的数目; 表 示 跟踪结果在判别模型中的判分阈值。若 ,表明跟踪结果可信;否则,表明目标状态 变化,可能发生旋转、目标快速运动或者被遮挡 等情况。 1.2 自适应模板更新策略 本节给出了一种基于极小值的模板更新策 略,旨在针对性地筛选出不同形状以及与背景相 似度较大的目标样本,用于对当前模板进行更 新,以增强模板对于不同形状和与背景相似的正 样本的泛化能力。 目标跟踪过程中,可观察到置信度呈现先下 降后上升的趋势,有 2 种情况可以解释:1) 目标 形状从偏离初始模板到逐渐恢复至与模板相似, 如目标的平面内旋转;2) 目标形状发生变化的过 程中,目标形状逐渐偏离初始模板,而背景中存 在与初始模板相近的区域,导致目标所在位置框 朝着背景方向漂移,如目标平面外的旋转。为了 能够让模板具有较好的鲁棒性,需要同时保证图 像标签为 1 的正样本的数量和多样性,当上述 2 种情况出现时表示目前样本的状态发生了变 化,需要对模板及时进行更新,使得跟踪器具有 更好的检测性能。因此,模板的更新条件设置 为:连续多帧目标跟踪框的置信度呈现先增后减 的趋势,即伴随有极小值的出现。基于这样的思 想,本文基于极值的模板更新策略具体过程如下。 1) 输入下一帧图像,采用 KCF 算法进行跟 目标检测 初始化 样本选取 特征提取 特征提取 或 训练 HOG+CN PCA 处理 在线跟踪 判别模型学习 判别模型 类别约束 模板学习 模板 更新 模板更新 响应图 跟踪正常 判别模型 集合更新 判别模型 集合更新 目标检测 遮挡 快速 运动 当前输出 跟踪 异常 跟踪 旋转 遮挡或者 快速运动 新判别 模型学习 HOG+CN 当前 输入 基于外观判别 模型的跟踪质量 判定 自适应模板 更新策略 图 1 目标跟踪新框架图示 Fig. 1 Overview of the proposed framework for visual tracking 第 1 期 宁欣,等:一种自适应模板更新的判别式 KCF 跟踪方法 ·123·