正在加载图片...
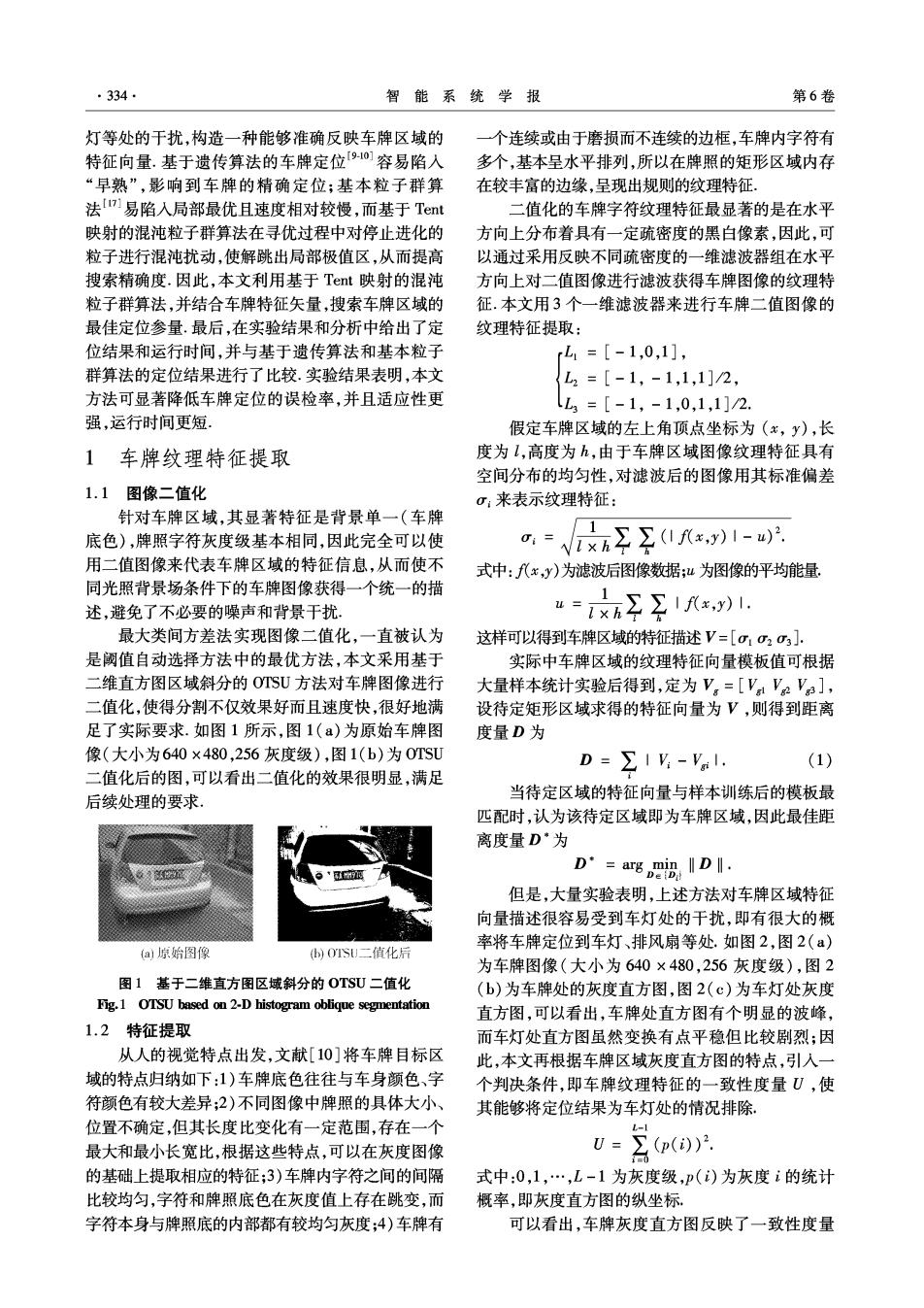
·334 智能系统学报 第6卷 灯等处的干扰,构造一种能够准确反映车牌区域的 一个连续或由于磨损而不连续的边框,车牌内字符有 特征向量.基于遗传算法的车牌定位容易陷人 多个,基本呈水平排列,所以在牌照的矩形区域内存 “早熟”,影响到车牌的精确定位;基本粒子群算 在较丰富的边缘,呈现出规则的纹理特征, 法易陷人局部最优且速度相对较慢,而基于Tent 二值化的车牌字符纹理特征最显著的是在水平 映射的混沌粒子群算法在寻优过程中对停止进化的 方向上分布着具有一定疏密度的黑白像素,因此,可 粒子进行混沌扰动,使解跳出局部极值区,从而提高 以通过采用反映不同疏密度的一维滤波器组在水平 搜索精确度.因此,本文利用基于Tent映射的混沌 方向上对二值图像进行滤波获得车牌图像的纹理特 粒子群算法,并结合车牌特征矢量,搜索车牌区域的 征.本文用3个一维滤波器来进行车牌二值图像的 最佳定位参量,最后,在实验结果和分析中给出了定 纹理特征提取: 位结果和运行时间,并与基于遗传算法和基本粒子 rL1=[-1,0,1], 群算法的定位结果进行了比较.实验结果表明,本文 L2=[-1,-1,1,1]/2, 方法可显著降低车牌定位的误检率,并且适应性更 L3=[-1,-1,0,1,1]/2. 强,运行时间更短 假定车牌区域的左上角顶点坐标为(x,y),长 1车牌纹理特征提取 度为l,高度为h,由于车牌区域图像纹理特征具有 空间分布的均匀性,对滤波后的图像用其标准偏差 1.1图像二值化 σ:来表示纹理特征: 针对车牌区域,其显著特征是背景单一(车牌 底色),牌照字符灰度级基本相同,因此完全可以使 a=211-明 用二值图像来代表车牌区域的特征信息,从而使不 式中:f(x,y)为滤波后图像数据;u为图像的平均能量。 同光照背景场条件下的车牌图像获得一个统一的描 述,避免了不必要的噪声和背景干扰, “=文621,). 最大类间方差法实现图像二值化,一直被认为 这样可以得到车牌区域的特征描述V=[σ,o2σ3]. 是阚值自动选择方法中的最优方法,本文采用基于 实际中车牌区域的纹理特征向量模板值可根据 二维直方图区域斜分的OTSU方法对车牌图像进行 大量样本统计实验后得到,定为V。=[VVV], 二值化,使得分割不仅效果好而且速度快,很好地满 设待定矩形区域求得的特征向量为V,则得到距离 足了实际要求.如图1所示,图1(a)为原始车牌图 度量D为 像(大小为640×480,256灰度级),图1(b)为0TSU D=∑IV-Vl. (1) 二值化后的图,可以看出二值化的效果很明显,满足 后续处理的要求 当待定区域的特征向量与样本训练后的模板最 匹配时,认为该待定区域即为车牌区域,因此最佳距 离度量D*为 D'arg omig Dll. 但是,大量实验表明,上述方法对车牌区域特征 向量描述很容易受到车灯处的干扰,即有很大的概 率将车牌定位到车灯、排风扇等处.如图2,图2(a) (a)原始图像 6)01S二值化后 为车牌图像(大小为640×480,256灰度级),图2 图1基于二维直方图区域斜分的OTSU二值化 (b)为车牌处的灰度直方图,图2(c)为车灯处灰度 Fig.1 OTSU based on 2-D histogram oblique segmentation 直方图,可以看出,车牌处直方图有个明显的波峰, 1.2特征提取 而车灯处直方图虽然变换有点平稳但比较剧烈;因 从人的视觉特点出发,文献[10]将车牌目标区 此,本文再根据车牌区域灰度直方图的特点,引入一 域的特点归纳如下:1)车牌底色往往与车身颜色、字 个判决条件,即车牌纹理特征的一致性度量U,使 符颜色有较大差异:2)不同图像中牌照的具体大小 其能够将定位结果为车灯处的情况排除。 位置不确定,但其长度比变化有一定范围,存在一个 最大和最小长宽比,根据这些特点,可以在灰度图像 U=Σ(()2. 的基础上提取相应的特征;3)车牌内字符之间的间隔 式中:0,1,…,L-1为灰度级,p()为灰度i的统计 比较均匀,字符和牌照底色在灰度值上存在跳变,而 概率,即灰度直方图的纵坐标 字符本身与牌照底的内部都有较均匀灰度;4)车牌有 可以看出,车牌灰度直方图反映了一致性度量