正在加载图片...
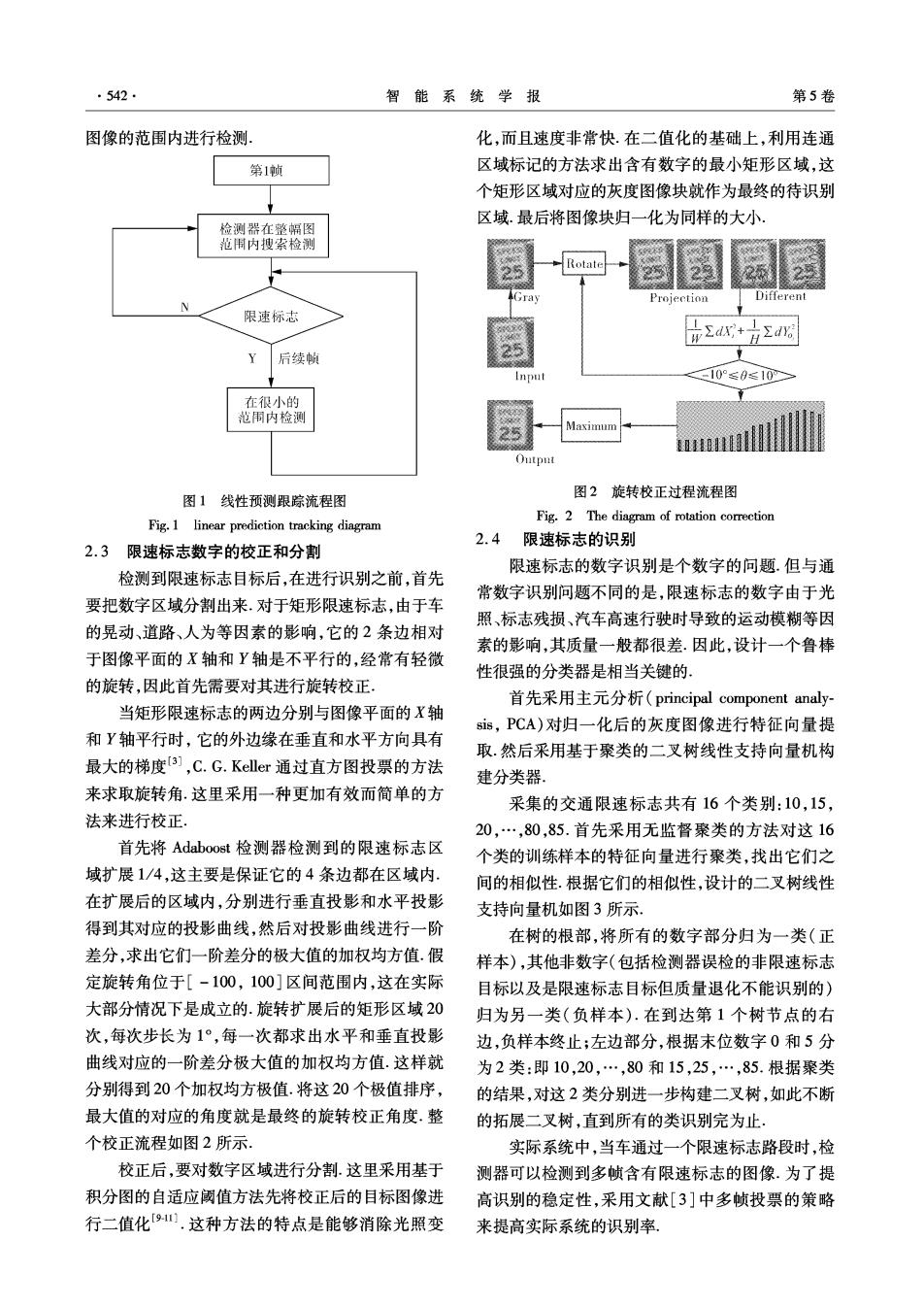
542. 智能系统学报 第5卷 图像的范围内进行检测, 化,而且速度非常快.在二值化的基础上,利用连通 第1帧 区域标记的方法求出含有数字的最小矩形区域,这 个矩形区域对应的灰度图像块就作为最终的待识别 区域.最后将图像块归一化为同样的大小 检测器在整幅图 范用内搜索检测 Rotate Projection Different 限速标志 Y 后续顿 Input 10°≤0≤10> 在很小的 范闱内检测 Maximum bnstoi18 Outpnt 图2旋转校正过程流程图 图1线性预测跟踪流程图 Fig.1 linear prediction tracking diagram Fig.2 The diagram of rotation correction 2.4 限速标志的识别 2.3限速标志数字的校正和分割 限速标志的数字识别是个数字的问题.但与通 检测到限速标志目标后,在进行识别之前,首先 常数字识别问题不同的是,限速标志的数字由于光 要把数字区域分割出来.对于矩形限速标志,由于车 照、标志残损、汽车高速行驶时导致的运动模糊等因 的晃动、道路、人为等因素的影响,它的2条边相对 素的影响,其质量一般都很差.因此,设计一个鲁棒 于图像平面的X轴和Y轴是不平行的,经常有轻微 性很强的分类器是相当关键的, 的旋转,因此首先需要对其进行旋转校正 首先采用主元分析(principal component analy 当矩形限速标志的两边分别与图像平面的X轴 s,PCA)对归一化后的灰度图像进行特征向量提 和Y轴平行时,它的外边缘在垂直和水平方向具有 取.然后采用基于聚类的二叉树线性支持向量机构 最大的梯度s],C.G.Keller通过直方图投票的方法 建分类器。 来求取旋转角.这里采用一种更加有效而简单的方 采集的交通限速标志共有16个类别:10,15, 法来进行校正。 20,…,80,85.首先采用无监督聚类的方法对这16 首先将Adaboost检测器检测到的限速标志区 个类的训练样本的特征向量进行聚类,找出它们之 域扩展1/4,这主要是保证它的4条边都在区域内. 间的相似性.根据它们的相似性,设计的二叉树线性 在扩展后的区域内,分别进行垂直投影和水平投影 支持向量机如图3所示 得到其对应的投影曲线,然后对投影曲线进行一阶 在树的根部,将所有的数字部分归为一类(正 差分,求出它们一阶差分的极大值的加权均方值.假 样本),其他非数字(包括检测器误检的非限速标志 定旋转角位于[-100,100]区间范围内,这在实际 目标以及是限速标志目标但质量退化不能识别的) 大部分情况下是成立的.旋转扩展后的矩形区域20 归为另一类(负样本).在到达第1个树节点的右 次,每次步长为1°,每一次都求出水平和垂直投影 边,负样本终止;左边部分,根据末位数字0和5分 曲线对应的一阶差分极大值的加权均方值.这样就 为2类:即10,20,…,80和15,25,…,85.根据聚类 分别得到20个加权均方极值.将这20个极值排序, 的结果,对这2类分别进一步构建二叉树,如此不断 最大值的对应的角度就是最终的旋转校正角度.整 的拓展二叉树,直到所有的类识别完为止: 个校正流程如图2所示. 实际系统中,当车通过一个限速标志路段时,检 校正后,要对数字区域进行分割这里采用基于 测器可以检测到多帧含有限速标志的图像.为了提 积分图的自适应阈值方法先将校正后的目标图像进 高识别的稳定性,采用文献[3]中多帧投票的策略 行二值化[91.这种方法的特点是能够消除光照变 来提高实际系统的识别率