正在加载图片...
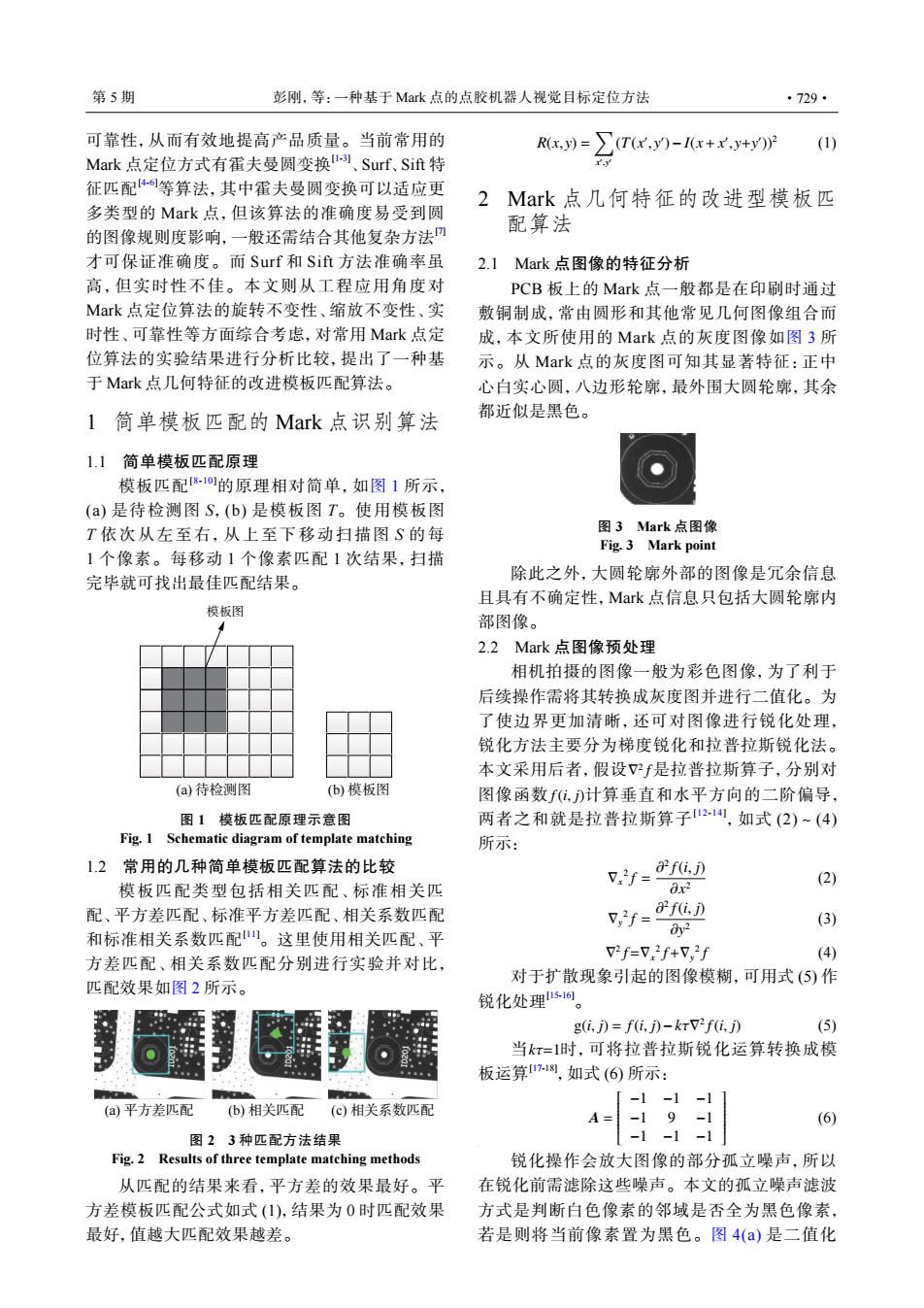
第5期 彭刚,等:一种基于Mak点的点胶机器人视觉目标定位方法 ·729· 可靠性,从而有效地提高产品质量。当前常用的 R(x.y)=>(T(x.y)-I(x+x.y+y) (1) Mark点定位方式有霍夫曼圆变换-a)、Surf、Sif特 征匹配46等算法,其中霍夫曼圆变换可以适应更 2Mark点几何特征的改进型模板匹 多类型的Mark点,但该算法的准确度易受到圆 的图像规则度影响,一般还需结合其他复杂方法口 配算法 才可保证准确度。而Surf和Sift方法准确率虽 2.1Mark点图像的特征分析 高,但实时性不佳。本文则从工程应用角度对 PCB板上的Mark点一般都是在印刷时通过 Mark点定位算法的旋转不变性、缩放不变性、实 敷铜制成,常由圆形和其他常见几何图像组合而 时性、可靠性等方面综合考虑,对常用Mark点定 成,本文所使用的Mark点的灰度图像如图3所 位算法的实验结果进行分析比较,提出了一种基 示。从Mark点的灰度图可知其显著特征:正中 于Mark点几何特征的改进模板匹配算法。 心白实心圆,八边形轮廓,最外围大圆轮廓,其余 1简单模板匹配的Mark点识别算法 都近似是黑色。 1.1简单模板匹配原理 模板匹配8.1的原理相对简单,如图1所示, (a)是待检测图S,(b)是模板图T。使用模板图 T依次从左至右,从上至下移动扫描图S的每 图3Mark点图像 Fig.3 Mark point 1个像素。每移动1个像素匹配1次结果,扫描 完毕就可找出最佳匹配结果。 除此之外,大圆轮廓外部的图像是冗余信息 且具有不确定性,Mak点信息只包括大圆轮廓内 模板图 部图像。 2.2Mark点图像预处理 相机拍摄的图像一般为彩色图像,为了利于 后续操作需将其转换成灰度图并进行二值化。为 了使边界更加清晰,还可对图像进行锐化处理, 锐化方法主要分为梯度锐化和拉普拉斯锐化法。 本文采用后者,假设2f是拉普拉斯算子,分别对 (a)待检测图 (b)模板图 图像函数f亿,)计算垂直和水平方向的二阶偏导, 图1模板匹配原理示意图 两者之和就是拉普拉斯算子21,如式(2)~(4) Fig.1 Schematic diagram of template matching 所示: 1.2常用的几种简单模板匹配算法的比较 2f=f) (2) 模板匹配类型包括相关匹配、标准相关匹 0x2 配、平方差匹配、标准平方差匹配、相关系数匹配 Vf=f(i.N) 2 (3) 和标准相关系数匹配。这里使用相关匹配、平 方差匹配、相关系数匹配分别进行实验并对比, 2f=V2f+7,2f (4) 匹配效果如图2所示。 对于扩散现象引起的图像模糊,可用式(⑤)作 锐化处理51。 g(i,)=fi,j)-kπfi,) (5) 当kπ=1时,可将拉普拉斯锐化运算转换成模 板运算1,如式(6)所示: (a)平方差匹配 -1-1-1 (b)相关匹配(©)相关系数匹配 9 (6) 图23种匹配方法结果 -1-1-1 Fig.2 Results of three template matching methods 锐化操作会放大图像的部分孤立噪声,所以 从匹配的结果来看,平方差的效果最好。平 在锐化前需滤除这些噪声。本文的孤立噪声滤波 方差模板匹配公式如式(1),结果为0时匹配效果 方式是判断白色像素的邻域是否全为黑色像素, 最好,值越大匹配效果越差。 若是则将当前像素置为黑色。图4(a)是二值化可靠性,从而有效地提高产品质量。当前常用的 Mark 点定位方式有霍夫曼圆变换[1-3] 、Surf、Sift 特 征匹配[4-6]等算法,其中霍夫曼圆变换可以适应更 多类型的 Mark 点,但该算法的准确度易受到圆 的图像规则度影响,一般还需结合其他复杂方法[7] 才可保证准确度。而 Surf 和 Sift 方法准确率虽 高,但实时性不佳。本文则从工程应用角度对 Mark 点定位算法的旋转不变性、缩放不变性、实 时性、可靠性等方面综合考虑,对常用 Mark 点定 位算法的实验结果进行分析比较,提出了一种基 于 Mark 点几何特征的改进模板匹配算法。 1 简单模板匹配的 Mark 点识别算法 1.1 简单模板匹配原理 模板匹配[8-10]的原理相对简单,如图 1 所示, (a) 是待检测图 S,(b) 是模板图 T。使用模板图 T 依次从左至右,从上至下移动扫描图 S 的每 1 个像素。每移动 1 个像素匹配 1 次结果,扫描 完毕就可找出最佳匹配结果。 模板图 (a) 待检测图 (b) 模板图 图 1 模板匹配原理示意图 Fig. 1 Schematic diagram of template matching 1.2 常用的几种简单模板匹配算法的比较 模板匹配类型包括相关匹配、标准相关匹 配、平方差匹配、标准平方差匹配、相关系数匹配 和标准相关系数匹配[11]。这里使用相关匹配、平 方差匹配、相关系数匹配分别进行实验并对比, 匹配效果如图 2 所示。 (a) 平方差匹配 (b) 相关匹配 (c) 相关系数匹配 图 2 3 种匹配方法结果 Fig. 2 Results of three template matching methods 从匹配的结果来看,平方差的效果最好。平 方差模板匹配公式如式 (1),结果为 0 时匹配效果 最好,值越大匹配效果越差。 R(x, y) = ∑ x ′ ,y ′ (T(x ′ , y ′ )− I(x+ x ′ , y+y ′ ))2 (1) 2 Mark 点几何特征的改进型模板匹 配算法 2.1 Mark 点图像的特征分析 PCB 板上的 Mark 点一般都是在印刷时通过 敷铜制成,常由圆形和其他常见几何图像组合而 成,本文所使用的 Mark 点的灰度图像如图 3 所 示。从 Mark 点的灰度图可知其显著特征:正中 心白实心圆,八边形轮廓,最外围大圆轮廓,其余 都近似是黑色。 图 3 Mark 点图像 Fig. 3 Mark point 除此之外,大圆轮廓外部的图像是冗余信息 且具有不确定性,Mark 点信息只包括大圆轮廓内 部图像。 2.2 Mark 点图像预处理 ∇ 2 f f(i, j) 相机拍摄的图像一般为彩色图像,为了利于 后续操作需将其转换成灰度图并进行二值化。为 了使边界更加清晰,还可对图像进行锐化处理, 锐化方法主要分为梯度锐化和拉普拉斯锐化法。 本文采用后者,假设 是拉普拉斯算子,分别对 图像函数 计算垂直和水平方向的二阶偏导, 两者之和就是拉普拉斯算子[12-14] ,如式 (2)~(4) 所示: ∇x 2 f = ∂ 2 f(i, j) ∂x 2 (2) ∇y 2 f = ∂ 2 f(i, j) ∂y 2 (3) ∇ 2 f=∇x 2 f+∇y 2 f (4) 对于扩散现象引起的图像模糊,可用式 (5) 作 锐化处理[15-16]。 g(i, j) = f(i, j)−kτ∇ 2 f(i, j) (5) 当 kτ=1 时,可将拉普拉斯锐化运算转换成模 板运算[17-18],如式 (6) 所示: A = −1 −1 −1 −1 9 −1 −1 −1 −1 (6) 锐化操作会放大图像的部分孤立噪声,所以 在锐化前需滤除这些噪声。本文的孤立噪声滤波 方式是判断白色像素的邻域是否全为黑色像素, 若是则将当前像素置为黑色。图 4(a) 是二值化 第 5 期 彭刚,等:一种基于 Mark 点的点胶机器人视觉目标定位方法 ·729·