点击下载:北京化工大学:《机械创新》课程授课教案(课件讲稿)第九章 创新实例与分析
正在加载图片...
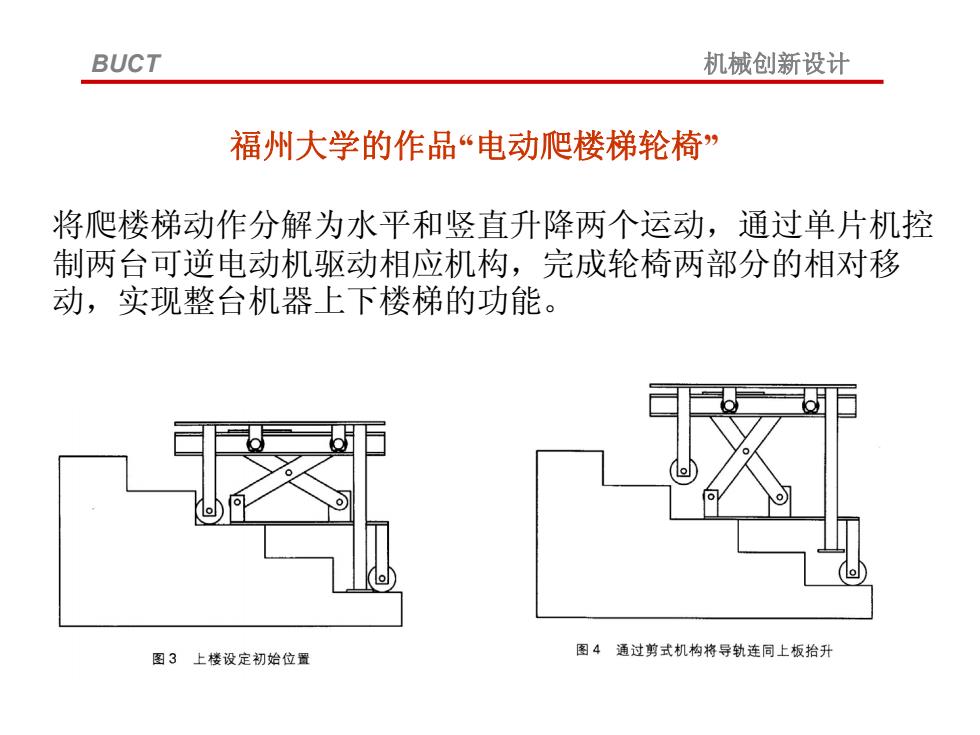
BUCT 机械创新设计 福州大学的作品“电动爬楼梯轮椅” 将爬楼梯动作分解为水平和竖直升降两个运动,通过单片机控 制两台可逆电动机驱动相应机构,完成轮椅两部分的相对移 动,实现整台机器上下楼梯的功能。 图3上楼设定初始位置 图4通过剪式机构将导轨连同上板拾升BUCT 机械创新设计 福州大学的作品“电动爬楼梯轮椅” 将爬楼梯动作分解为水平和竖直升降两个运动,通过单片机控 制两台可逆电动机驱动相应机构,完成轮椅两部分的相对移 动,实现整台机器上下楼梯的功能
<<向上翻页
向下翻页>>
点击下载:北京化工大学:《机械创新》课程授课教案(课件讲稿)第九章 创新实例与分析
©2008-现在 cucdc.com 高等教育资讯网 版权所有