正在加载图片...
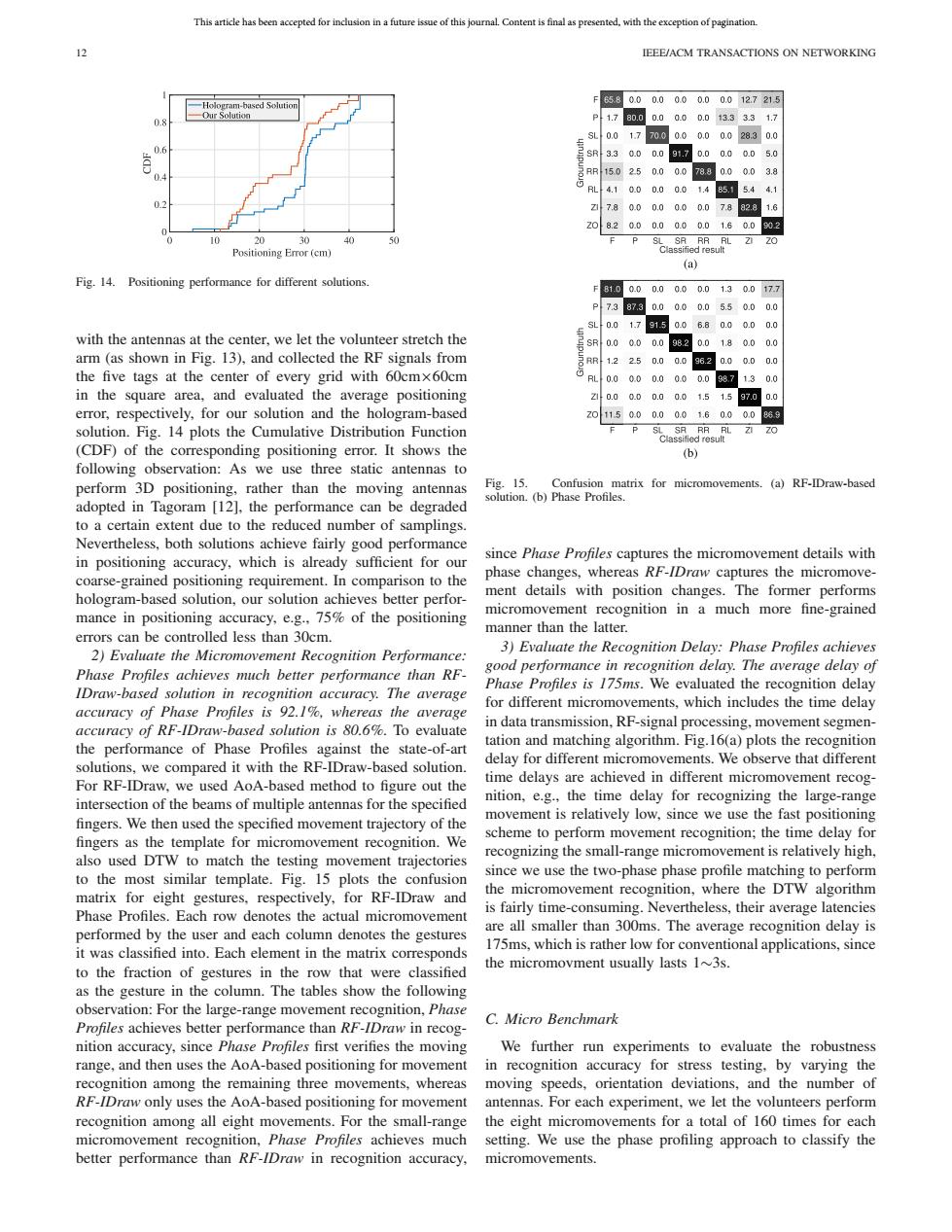
This article has been accepted for inclusion in a future issue of this journal.Content is final as presented,with the exception of pagination IEEE/ACM TRANSACTIONS ON NETWORKING -hased solution F6580.00.00.00.00.012.7215 08 lutid P1.70.00.00.00.0133331.7 0.01.770.00.00.00.028.30.0 sR3.30.0 0.09170.00.00.05.0 150250.00.07880.00.03.8 RL 4.10.0 0.00.01485.5441 7.80.0 0.0000.07.88281.6 208.20.00.00.00.01.60.002 10 20 30 40 5 220 Positioning Error(cm) (a) Fig.14.Positioning performance for different solutions. FB100.00.00.00.01.30.0177 P7.387,30.00.00.0550.0 0.0 s0.01.7915 0.06.80.00.00.0 with the antennas at the center,we let the volunteer stretch the 0.00.0 0.09820.0 180.00.0 arm(as shown in Fig.13),and collected the RF signals from 言RR1.22.50.00.096.20.00.0 0.0 the five tags at the center of every grid with 60cmx60cm RL 0.00.00.00.0 0.098,7130.0 in the square area,and evaluated the average positioning 20.00.00.00.01.51.597.00.0 error,respectively,for our solution and the hologram-based Z01150.00.00.01.60.00.0e9 solution.Fig.14 plots the Cumulative Distribution Function F P (CDF)of the corresponding positioning error.It shows the 6 following observation:As we use three static antennas to perform 3D positioning,rather than the moving antennas Fig.15. Confusion matrix for micromovements.(a)RF-IDraw-based solution.(b)Phase Profiles. adopted in Tagoram [12],the performance can be degraded to a certain extent due to the reduced number of samplings. Nevertheless,both solutions achieve fairly good performance since Phase Profiles captures the micromovement details with in positioning accuracy,which is already sufficient for our coarse-grained positioning requirement.In comparison to the phase changes,whereas RF-IDraw captures the micromove- ment details with position changes.The former performs hologram-based solution,our solution achieves better perfor- mance in positioning accuracy,e.g..75%of the positioning micromovement recognition in a much more fine-grained manner than the latter. errors can be controlled less than 30cm. 2)Evaluate the Micromovement Recognition Performance: 3)Evaluate the Recognition Delay:Phase Profiles achieves Phase Profiles achieves much better performance than RF- good performance in recognition delay.The average delay of Phase Profiles is 175ms.We evaluated the recognition delay IDraw-based solution in recognition accuracy.The average for different micromovements,which includes the time delay accuracy of Phase Profiles is 92.1%,whereas the average accuracy of RF-IDraw-based solution is 80.6%.To evaluate in data transmission,RF-signal processing,movement segmen- the performance of Phase Profiles against the state-of-art tation and matching algorithm.Fig.16(a)plots the recognition solutions,we compared it with the RF-IDraw-based solution. delay for different micromovements.We observe that different For RF-IDraw,we used AoA-based method to figure out the time delays are achieved in different micromovement recog- intersection of the beams of multiple antennas for the specified nition,e.g.,the time delay for recognizing the large-range fingers.We then used the specified movement trajectory of the movement is relatively low,since we use the fast positioning scheme to perform movement recognition;the time delay for fingers as the template for micromovement recognition.We recognizing the small-range micromovement is relatively high, also used DTW to match the testing movement trajectories to the most similar template.Fig.15 plots the confusion since we use the two-phase phase profile matching to perform the micromovement recognition,where the DTW algorithm matrix for eight gestures,respectively,for RF-IDraw and Phase Profiles.Each row denotes the actual micromovement is fairly time-consuming.Nevertheless,their average latencies performed by the user and each column denotes the gestures are all smaller than 300ms.The average recognition delay is it was classified into.Each element in the matrix corresponds 175ms,which is rather low for conventional applications,since the micromovment usually lasts 1~3s. to the fraction of gestures in the row that were classified as the gesture in the column.The tables show the following observation:For the large-range movement recognition,Phase Profiles achieves better performance than RF-IDraw in recog- C.Micro Benchmark nition accuracy,since Phase Profiles first verifies the moving We further run experiments to evaluate the robustness range,and then uses the AoA-based positioning for movement in recognition accuracy for stress testing,by varying the recognition among the remaining three movements,whereas moving speeds,orientation deviations,and the number of RF-IDraw only uses the AoA-based positioning for movement antennas.For each experiment,we let the volunteers perform recognition among all eight movements.For the small-range the eight micromovements for a total of 160 times for each micromovement recognition,Phase Profiles achieves much setting.We use the phase profiling approach to classify the better performance than RF-IDraw in recognition accuracy, micromovements.This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination. 12 IEEE/ACM TRANSACTIONS ON NETWORKING Fig. 14. Positioning performance for different solutions. with the antennas at the center, we let the volunteer stretch the arm (as shown in Fig. 13), and collected the RF signals from the five tags at the center of every grid with 60cm×60cm in the square area, and evaluated the average positioning error, respectively, for our solution and the hologram-based solution. Fig. 14 plots the Cumulative Distribution Function (CDF) of the corresponding positioning error. It shows the following observation: As we use three static antennas to perform 3D positioning, rather than the moving antennas adopted in Tagoram [12], the performance can be degraded to a certain extent due to the reduced number of samplings. Nevertheless, both solutions achieve fairly good performance in positioning accuracy, which is already sufficient for our coarse-grained positioning requirement. In comparison to the hologram-based solution, our solution achieves better performance in positioning accuracy, e.g., 75% of the positioning errors can be controlled less than 30cm. 2) Evaluate the Micromovement Recognition Performance: Phase Profiles achieves much better performance than RFIDraw-based solution in recognition accuracy. The average accuracy of Phase Profiles is 92.1%, whereas the average accuracy of RF-IDraw-based solution is 80.6%. To evaluate the performance of Phase Profiles against the state-of-art solutions, we compared it with the RF-IDraw-based solution. For RF-IDraw, we used AoA-based method to figure out the intersection of the beams of multiple antennas for the specified fingers. We then used the specified movement trajectory of the fingers as the template for micromovement recognition. We also used DTW to match the testing movement trajectories to the most similar template. Fig. 15 plots the confusion matrix for eight gestures, respectively, for RF-IDraw and Phase Profiles. Each row denotes the actual micromovement performed by the user and each column denotes the gestures it was classified into. Each element in the matrix corresponds to the fraction of gestures in the row that were classified as the gesture in the column. The tables show the following observation: For the large-range movement recognition, Phase Profiles achieves better performance than RF-IDraw in recognition accuracy, since Phase Profiles first verifies the moving range, and then uses the AoA-based positioning for movement recognition among the remaining three movements, whereas RF-IDraw only uses the AoA-based positioning for movement recognition among all eight movements. For the small-range micromovement recognition, Phase Profiles achieves much better performance than RF-IDraw in recognition accuracy, Fig. 15. Confusion matrix for micromovements. (a) RF-IDraw-based solution. (b) Phase Profiles. since Phase Profiles captures the micromovement details with phase changes, whereas RF-IDraw captures the micromovement details with position changes. The former performs micromovement recognition in a much more fine-grained manner than the latter. 3) Evaluate the Recognition Delay: Phase Profiles achieves good performance in recognition delay. The average delay of Phase Profiles is 175ms. We evaluated the recognition delay for different micromovements, which includes the time delay in data transmission, RF-signal processing, movement segmentation and matching algorithm. Fig.16(a) plots the recognition delay for different micromovements. We observe that different time delays are achieved in different micromovement recognition, e.g., the time delay for recognizing the large-range movement is relatively low, since we use the fast positioning scheme to perform movement recognition; the time delay for recognizing the small-range micromovement is relatively high, since we use the two-phase phase profile matching to perform the micromovement recognition, where the DTW algorithm is fairly time-consuming. Nevertheless, their average latencies are all smaller than 300ms. The average recognition delay is 175ms, which is rather low for conventional applications, since the micromovment usually lasts 1∼3s. C. Micro Benchmark We further run experiments to evaluate the robustness in recognition accuracy for stress testing, by varying the moving speeds, orientation deviations, and the number of antennas. For each experiment, we let the volunteers perform the eight micromovements for a total of 160 times for each setting. We use the phase profiling approach to classify the micromovements