正在加载图片...
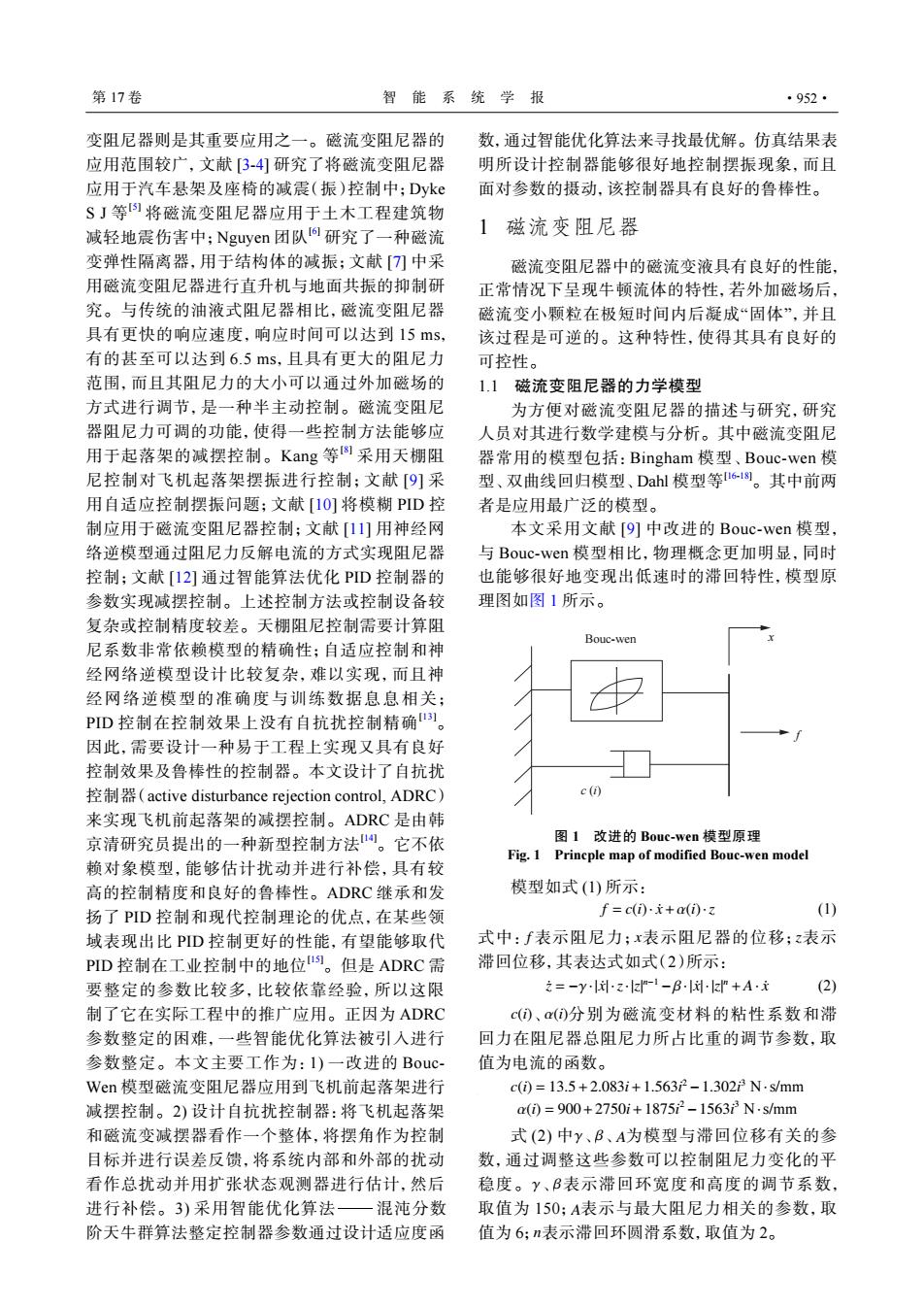
第17卷 智能系统学报 ·952· 变阻尼器则是其重要应用之一。磁流变阻尼器的 数,通过智能优化算法来寻找最优解。仿真结果表 应用范围较广,文献[3-4]研究了将磁流变阻尼器 明所设计控制器能够很好地控制摆振现象,而且 应用于汽车悬架及座椅的减震(振)控制中;Dyke 面对参数的摄动,该控制器具有良好的鲁棒性。 SJ等将磁流变阻尼器应用于土木工程建筑物 减轻地震伤害中;Nguyen团队I研究了一种磁流 1磁流变阻尼器 变弹性隔离器,用于结构体的减振;文献[)中采 磁流变阻尼器中的磁流变液具有良好的性能, 用磁流变阻尼器进行直升机与地面共振的抑制研 正常情况下呈现牛顿流体的特性,若外加磁场后, 究。与传统的油液式阻尼器相比,磁流变阻尼器 磁流变小颗粒在极短时间内后凝成“固体”,并且 具有更快的响应速度,响应时间可以达到15ms 该过程是可逆的。这种特性,使得其具有良好的 有的甚至可以达到6.5ms,且具有更大的阻尼力 可控性。 范围,而且其阻尼力的大小可以通过外加磁场的 1.1 磁流变阻尼器的力学模型 方式进行调节,是一种半主动控制。磁流变阻尼 为方便对磁流变阻尼器的描述与研究,研究 器阻尼力可调的功能,使得一些控制方法能够应 人员对其进行数学建模与分析。其中磁流变阻尼 用于起落架的减摆控制。Kang等采用天棚阻 器常用的模型包括:Bingham模型、Bouc-wen模 尼控制对飞机起落架摆振进行控制;文献[9]采 型、双曲线回归模型、Dahl模型等6-1。其中前两 用自适应控制摆振问题;文献[10]将模糊PD控 者是应用最广泛的模型。 制应用于磁流变阻尼器控制;文献[11]用神经网 本文采用文献[9]中改进的Bouc-wen模型, 络逆模型通过阻尼力反解电流的方式实现阻尼器 与Bouc-wen模型相比,物理概念更加明显,同时 控制;文献[12]通过智能算法优化PD控制器的 也能够很好地变现出低速时的滞回特性,模型原 参数实现减摆控制。上述控制方法或控制设备较 理图如图1所示。 复杂或控制精度较差。天棚阻尼控制需要计算阻 Bouc-wen 尼系数非常依赖模型的精确性;自适应控制和神 经网络逆模型设计比较复杂,难以实现,而且神 经网络逆模型的准确度与训练数据息息相关; PID控制在控制效果上没有自抗扰控制精确1。 因此,需要设计一种易于工程上实现又具有良好 控制效果及鲁棒性的控制器。本文设计了自抗扰 控制器(active disturbance rejection control,.ADRC) 来实现飞机前起落架的减摆控制。ADRC是由韩 京清研究员提出的一种新型控制方法。它不依 图1改进的Bouc-wen模型原理 Fig.1 Princple map of modified Bouc-wen model 赖对象模型,能够估计扰动并进行补偿,具有较 高的控制精度和良好的鲁棒性。ADRC继承和发 模型如式(1)所示: 扬了PD控制和现代控制理论的优点,在某些领 f=c(i)文+a(i)z (1) 域表现出比PD控制更好的性能,有望能够取代 式中:f表示阻尼力;x表示阻尼器的位移;表示 PID控制在工业控制中的地位。但是ADRC需 滞回位移,其表达式如式(2)所示: 要整定的参数比较多,比较依靠经验,所以这限 之=-y闭zlm-1-B闭"+A元 (2) 制了它在实际工程中的推广应用。正因为ADRC c(①、a()分别为磁流变材料的粘性系数和滞 参数整定的困难,一些智能优化算法被引入进行 回力在阻尼器总阻尼力所占比重的调节参数,取 参数整定。本文主要工作为:I)一改进的Bouc- 值为电流的函数。 Wen模型磁流变阻尼器应用到飞机前起落架进行 c()=13.5+2.083i+1.5632-1.302°N.s/mm 减摆控制。2)设计自抗扰控制器:将飞机起落架 a(0=900+2750i+18752-1563N.s/mm 和磁流变减摆器看作一个整体,将摆角作为控制 式(2)中y、B、A为模型与滞回位移有关的参 目标并进行误差反馈,将系统内部和外部的扰动 数,通过调整这些参数可以控制阻尼力变化的平 看作总扰动并用扩张状态观测器进行估计,然后 稳度。y、B表示滞回环宽度和高度的调节系数, 进行补偿。3)采用智能优化算法一混沌分数 取值为150;A表示与最大阻尼力相关的参数,取 阶天牛群算法整定控制器参数通过设计适应度函 值为6:n表示滞回环圆滑系数,取值为2。变阻尼器则是其重要应用之一。磁流变阻尼器的 应用范围较广,文献 [3-4] 研究了将磁流变阻尼器 应用于汽车悬架及座椅的减震(振)控制中;Dyke S J 等 [5] 将磁流变阻尼器应用于土木工程建筑物 减轻地震伤害中;Nguyen 团队[6] 研究了一种磁流 变弹性隔离器,用于结构体的减振;文献 [7] 中采 用磁流变阻尼器进行直升机与地面共振的抑制研 究。与传统的油液式阻尼器相比,磁流变阻尼器 具有更快的响应速度,响应时间可以达到 15 ms, 有的甚至可以达到 6.5 ms,且具有更大的阻尼力 范围,而且其阻尼力的大小可以通过外加磁场的 方式进行调节,是一种半主动控制。磁流变阻尼 器阻尼力可调的功能,使得一些控制方法能够应 用于起落架的减摆控制。Kang 等 [8] 采用天棚阻 尼控制对飞机起落架摆振进行控制;文献 [9] 采 用自适应控制摆振问题;文献 [10] 将模糊 PID 控 制应用于磁流变阻尼器控制;文献 [11] 用神经网 络逆模型通过阻尼力反解电流的方式实现阻尼器 控制;文献 [12] 通过智能算法优化 PID 控制器的 参数实现减摆控制。上述控制方法或控制设备较 复杂或控制精度较差。天棚阻尼控制需要计算阻 尼系数非常依赖模型的精确性;自适应控制和神 经网络逆模型设计比较复杂,难以实现,而且神 经网络逆模型的准确度与训练数据息息相关; PID 控制在控制效果上没有自抗扰控制精确[13]。 因此,需要设计一种易于工程上实现又具有良好 控制效果及鲁棒性的控制器。本文设计了自抗扰 控制器(active disturbance rejection control, ADRC) 来实现飞机前起落架的减摆控制。ADRC 是由韩 京清研究员提出的一种新型控制方法[14]。它不依 赖对象模型,能够估计扰动并进行补偿,具有较 高的控制精度和良好的鲁棒性。ADRC 继承和发 扬了 PID 控制和现代控制理论的优点,在某些领 域表现出比 PID 控制更好的性能,有望能够取代 PID 控制在工业控制中的地位[15]。但是 ADRC 需 要整定的参数比较多,比较依靠经验,所以这限 制了它在实际工程中的推广应用。正因为 ADRC 参数整定的困难,一些智能优化算法被引入进行 参数整定。本文主要工作为:1) 一改进的 BoucWen 模型磁流变阻尼器应用到飞机前起落架进行 减摆控制。2) 设计自抗扰控制器:将飞机起落架 和磁流变减摆器看作一个整体,将摆角作为控制 目标并进行误差反馈,将系统内部和外部的扰动 看作总扰动并用扩张状态观测器进行估计,然后 进行补偿。3) 采用智能优化算法−混沌分数 阶天牛群算法整定控制器参数通过设计适应度函 数,通过智能优化算法来寻找最优解。仿真结果表 明所设计控制器能够很好地控制摆振现象,而且 面对参数的摄动,该控制器具有良好的鲁棒性。 1 磁流变阻尼器 磁流变阻尼器中的磁流变液具有良好的性能, 正常情况下呈现牛顿流体的特性,若外加磁场后, 磁流变小颗粒在极短时间内后凝成“固体”,并且 该过程是可逆的。这种特性,使得其具有良好的 可控性。 1.1 磁流变阻尼器的力学模型 为方便对磁流变阻尼器的描述与研究,研究 人员对其进行数学建模与分析。其中磁流变阻尼 器常用的模型包括:Bingham 模型、Bouc-wen 模 型、双曲线回归模型、Dahl 模型等[16-18]。其中前两 者是应用最广泛的模型。 本文采用文献 [9] 中改进的 Bouc-wen 模型, 与 Bouc-wen 模型相比,物理概念更加明显,同时 也能够很好地变现出低速时的滞回特性,模型原 理图如图 1 所示。 Bouc-wen c (i) x f 图 1 改进的 Bouc-wen 模型原理 Fig. 1 Princple map of modified Bouc-wen model 模型如式 (1) 所示: f = c(i)· x˙ +α(i)·z (1) 式中: f 表示阻尼力;x表示阻尼器的位移; z 表示 滞回位移,其表达式如式(2)所示: z˙ = −γ · |x˙| ·z· |z| n−1 −β · |x˙| · |z| n + A· x˙ (2) c(i)、α(i) 分别为磁流变材料的粘性系数和滞 回力在阻尼器总阻尼力所占比重的调节参数,取 值为电流的函数。 c(i) = 13.5+2.083i+1.563i 2 −1.302i 3 N·s/mm α(i) = 900+2750i+1875i 2 −1563i 3 N·s/mm γ β A γ β A n 式 (2) 中 、 、 为模型与滞回位移有关的参 数,通过调整这些参数可以控制阻尼力变化的平 稳度。 、 表示滞回环宽度和高度的调节系数, 取值为 150; 表示与最大阻尼力相关的参数,取 值为 6; 表示滞回环圆滑系数,取值为 2。 第 17 卷 智 能 系 统 学 报 ·952·