正在加载图片...
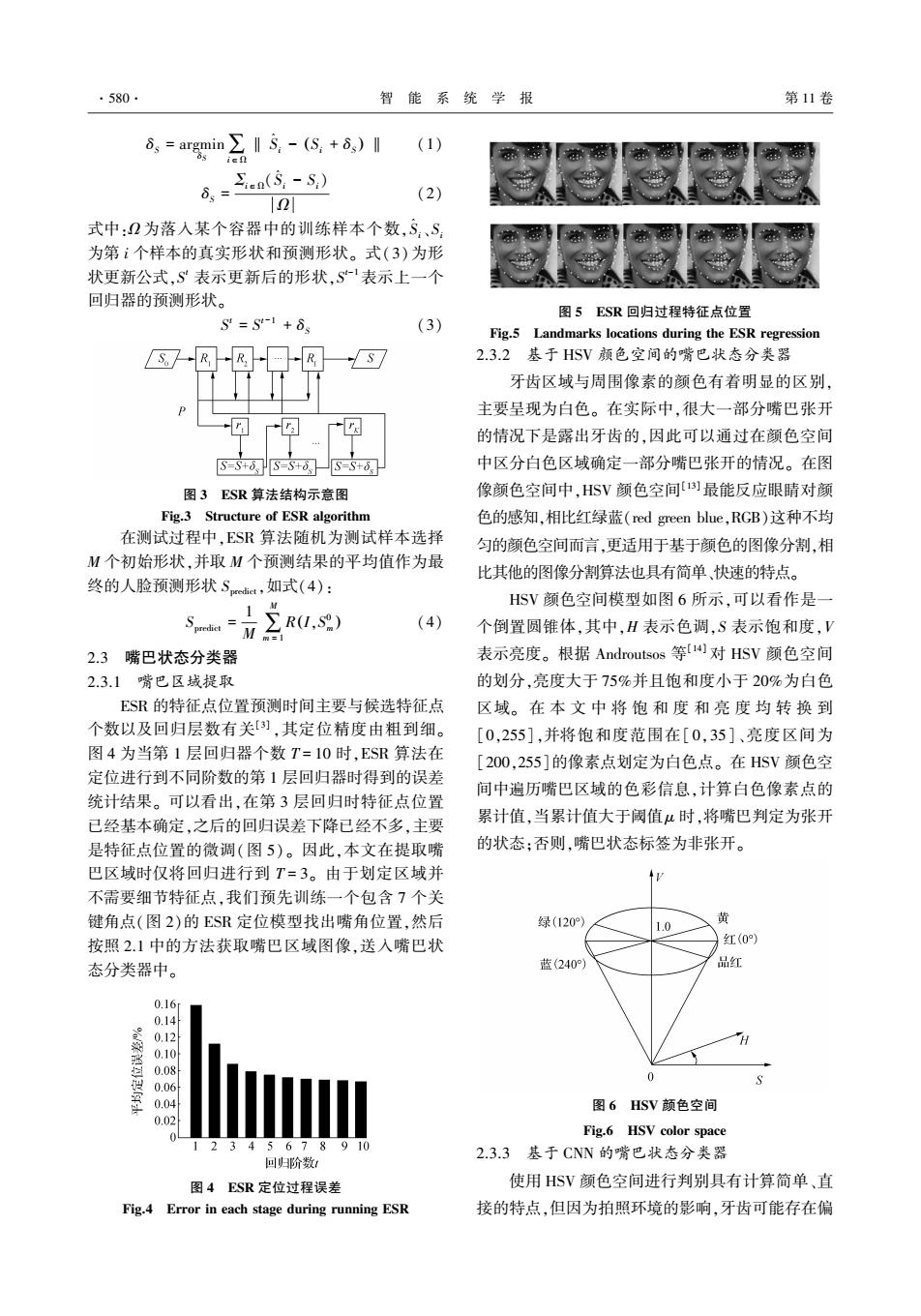
·580 智能系统学报 第11卷 d。=argmin∑I5.-(S,+6,)1 (1) ien &=2(③-S) 2 (2) 式中:2为落入某个容器中的训练样本个数,S、S 为第i个样本的真实形状和预测形状。式(3)为形 状更新公式,S表示更新后的形状,S-表示上一个 回归器的预测形状。 图5ESR回归过程特征点位置 S=S-1+6 (3) Fig.5 Landmarks locations during the ESR regression S-RR 2.3.2基于HSV颜色空间的嘴巴状态分类器 牙齿区域与周围像素的颜色有着明显的区别, 主要呈现为白色。在实际中,很大一部分嘴巴张开 的情况下是露出牙齿的,因此可以通过在颜色空间 SS+d=S+dS=S+d网 中区分白色区域确定一部分嘴巴张开的情况。在图 图3ESR算法结构示意图 像颜色空间中,HSV颜色空间]最能反应眼睛对颜 Fig.3 Structure of ESR algorithm 色的感知,相比红绿蓝(red green blue,RGB)这种不均 在测试过程中,ESR算法随机为测试样本选择 匀的颜色空间而言,更适用于基于颜色的图像分割,相 M个初始形状,并取M个预测结果的平均值作为最 比其他的图像分割算法也具有简单、快速的特点。 终的人脸预测形状S,如式(4): HSV颜色空间模型如图6所示,可以看作是一 ∑R(I,s9) (4) 个倒置圆锥体,其中,H表示色调,S表示饱和度,V 2.3嘴巴状态分类器 表示亮度。根据Androutsos等4对HSV颜色空间 2.3.1嘴巴区域提取 的划分,亮度大于75%并且饱和度小于20%为白色 ESR的特征点位置预测时间主要与候选特征点 区域。在本文中将饱和度和亮度均转换到 个数以及回归层数有关[),其定位精度由粗到细。 [0,255],并将饱和度范围在[0,35]、亮度区间为 图4为当第1层回归器个数T=10时,ESR算法在 [200,255]的像素点划定为白色点。在HSV颜色空 定位进行到不同阶数的第1层回归器时得到的误差 间中遍历嘴巴区域的色彩信息,计算白色像素点的 统计结果。可以看出,在第3层回归时特征点位置 已经基本确定,之后的回归误差下降已经不多,主要 累计值,当累计值大于阈值μ时,将嘴巴判定为张开 是特征点位置的微调(图5)。因此,本文在提取嘴 的状态:否则,嘴巴状态标签为非张开。 巴区域时仅将回归进行到T=3。由于划定区域并 不需要细节特征点,我们预先训练一个包含7个关 键角点(图2)的ESR定位模型找出嘴角位置,然后 绿(120》 1.0 黄 按照2.1中的方法获取嘴巴区域图像,送入嘴巴状 红(0) 态分类器中。 蓝(240) 品红 0.16 0.14 0.12 0.10 0.08 0.06 0 0.04 图6HSV颜色空间 0.02 Fig.6 HSV color space 12345678910 2.3.3基于CNN的嘴巴状态分类器 回归阶数 图4ESR定位过程误差 使用HSV颜色空间进行判别具有计算简单、直 Fig.4 Error in each stage during running ESR 接的特点,但因为拍照环境的影响,牙齿可能存在偏δS = argmin δS ∑i∈Ω ‖ S ^ i - Si + δS ( ) ‖ (1) δS = Σi∈Ω(S ^ i - Si) Ω (2) 式中:Ω 为落入某个容器中的训练样本个数,S ^ i、Si 为第 i 个样本的真实形状和预测形状。 式(3)为形 状更新公式,S t 表示更新后的形状,S t-1表示上一个 回归器的预测形状。 S t = S t-1 + δS (3) 图 3 ESR 算法结构示意图 Fig.3 Structure of ESR algorithm 在测试过程中,ESR 算法随机为测试样本选择 M 个初始形状,并取 M 个预测结果的平均值作为最 终的人脸预测形状 Spredict,如式(4): Spredict = 1 M ∑ M m = 1 R I,S 0 m ( ) (4) 2.3 嘴巴状态分类器 2.3.1 嘴巴区域提取 ESR 的特征点位置预测时间主要与候选特征点 个数以及回归层数有关[3] ,其定位精度由粗到细。 图 4 为当第 1 层回归器个数 T = 10 时,ESR 算法在 定位进行到不同阶数的第 1 层回归器时得到的误差 统计结果。 可以看出,在第 3 层回归时特征点位置 已经基本确定,之后的回归误差下降已经不多,主要 是特征点位置的微调(图 5)。 因此,本文在提取嘴 巴区域时仅将回归进行到 T = 3。 由于划定区域并 不需要细节特征点,我们预先训练一个包含 7 个关 键角点(图 2)的 ESR 定位模型找出嘴角位置,然后 按照 2.1 中的方法获取嘴巴区域图像,送入嘴巴状 态分类器中。 图 4 ESR 定位过程误差 Fig.4 Error in each stage during running ESR 图 5 ESR 回归过程特征点位置 Fig.5 Landmarks locations during the ESR regression 2.3.2 基于 HSV 颜色空间的嘴巴状态分类器 牙齿区域与周围像素的颜色有着明显的区别, 主要呈现为白色。 在实际中,很大一部分嘴巴张开 的情况下是露出牙齿的,因此可以通过在颜色空间 中区分白色区域确定一部分嘴巴张开的情况。 在图 像颜色空间中,HSV 颜色空间[13]最能反应眼睛对颜 色的感知,相比红绿蓝(red green blue,RGB)这种不均 匀的颜色空间而言,更适用于基于颜色的图像分割,相 比其他的图像分割算法也具有简单、快速的特点。 HSV 颜色空间模型如图 6 所示,可以看作是一 个倒置圆锥体,其中,H 表示色调,S 表示饱和度,V 表示亮度。 根据 Androutsos 等[14] 对 HSV 颜色空间 的划分,亮度大于 75%并且饱和度小于 20%为白色 区域。 在 本 文 中 将 饱 和 度 和 亮 度 均 转 换 到 [0,255],并将饱和度范围在[ 0,35]、亮度区间为 [200,255]的像素点划定为白色点。 在 HSV 颜色空 间中遍历嘴巴区域的色彩信息,计算白色像素点的 累计值,当累计值大于阈值 μ 时,将嘴巴判定为张开 的状态;否则,嘴巴状态标签为非张开。 图 6 HSV 颜色空间 Fig.6 HSV color space 2.3.3 基于 CNN 的嘴巴状态分类器 使用 HSV 颜色空间进行判别具有计算简单、直 接的特点,但因为拍照环境的影响,牙齿可能存在偏 ·580· 智 能 系 统 学 报 第 11 卷