正在加载图片...
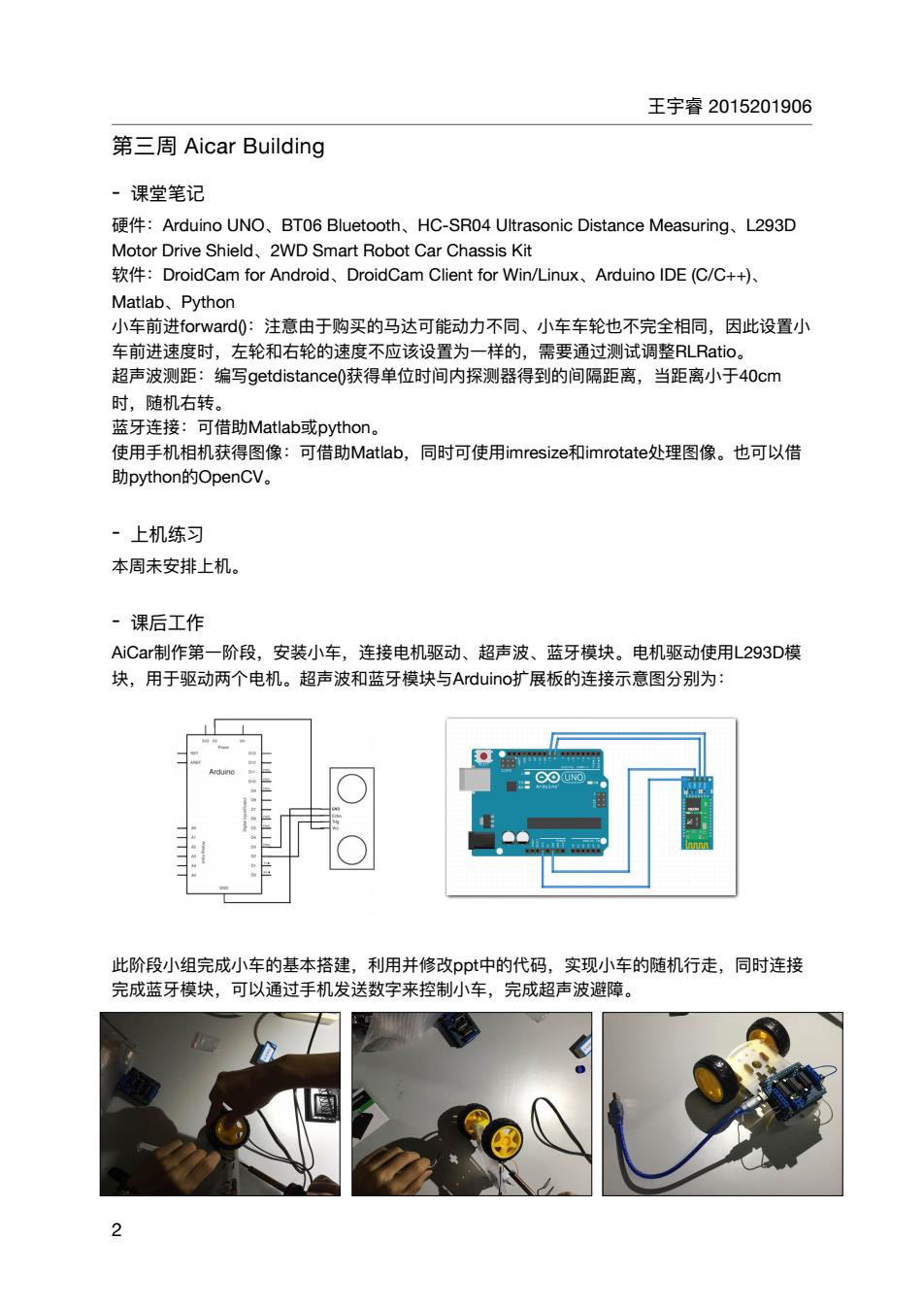
王宇睿2015201906 第三周Aicar Building 。课堂笔记 t硬件:Arduino UNO、BTO6 Bluetooth、HC-SR04 Ultrasonic Distance Measuring、.L293D Motor Drive Shield 2WD Smart Robot Car Chassis Kit 软件:DroidCam for Android、DroidCam Client for Win/inux、Arduino IDE(C/C++l、 Matlab.Python 小车前0 ward0:注意由于购买的马达可能动力不同、小车车轮也不完全相同,因此设置小 车前进速度时,左轮和右轮的速度不应该设置为一样的,需要通过测试调整RLRatio。. 超声波测距:编写getdistance0获得单位时间内探测器得到的间隔距离,当距离小于40cm 时随机右转 蓝牙连接:可借助Matlab或python. 使用手机相机获得图像:可借助MatIab,同时可使用imresize和imrotate处理图像。也可以借 助python的OpenCV, ·上机练习 本周未安排上机。 ·课后工作 AiCar制作第一阶段,安装小车,连接电机驱动、超声波、蓝牙模块。电机驱动使用L293D模 块,用于驱动两个电机。超声波和蓝牙模块与Arduino扩展板的连接示意图分别为: 此阶段小组完成小车的基本搭建,利用并修改知pt中的代码,实现小车的随机行走,同时连接 完成蓝牙模块,可以通过手机发送数字来控制小车,完成超声波避障。王宇睿 2015201906 第三周 Aicar Building - 课堂笔记 硬件:Arduino UNO、BT06 Bluetooth、HC-SR04 Ultrasonic Distance Measuring、L293D Motor Drive Shield、2WD Smart Robot Car Chassis Kit 软件:DroidCam for Android、DroidCam Client for Win/Linux、Arduino IDE (C/C++)、 Matlab、Python ⼩⻋前进forward():注意由于购买的⻢达可能动⼒不同、⼩⻋⻋轮也不完全相同,因此设置⼩ ⻋前进速度时,左轮和右轮的速度不应该设置为⼀样的,需要通过测试调整RLRatio。 超声波测距:编写getdistance()获得单位时间内探测器得到的间隔距离,当距离⼩于40cm 时,随机右转。 蓝⽛连接:可借助Matlab或python。 使⽤⼿机相机获得图像:可借助Matlab,同时可使⽤imresize和imrotate处理图像。也可以借 助python的OpenCV。 - 上机练习 本周未安排上机。 - 课后⼯作 AiCar制作第⼀阶段,安装⼩⻋,连接电机驱动、超声波、蓝⽛模块。电机驱动使⽤L293D模 块,⽤于驱动两个电机。超声波和蓝⽛模块与Arduino扩展板的连接示意图分别为: 此阶段⼩组完成⼩⻋的基本搭建,利⽤并修改ppt中的代码,实现⼩⻋的随机⾏⾛,同时连接 完成蓝⽛模块,可以通过⼿机发送数字来控制⼩⻋,完成超声波避障。 2