正在加载图片...
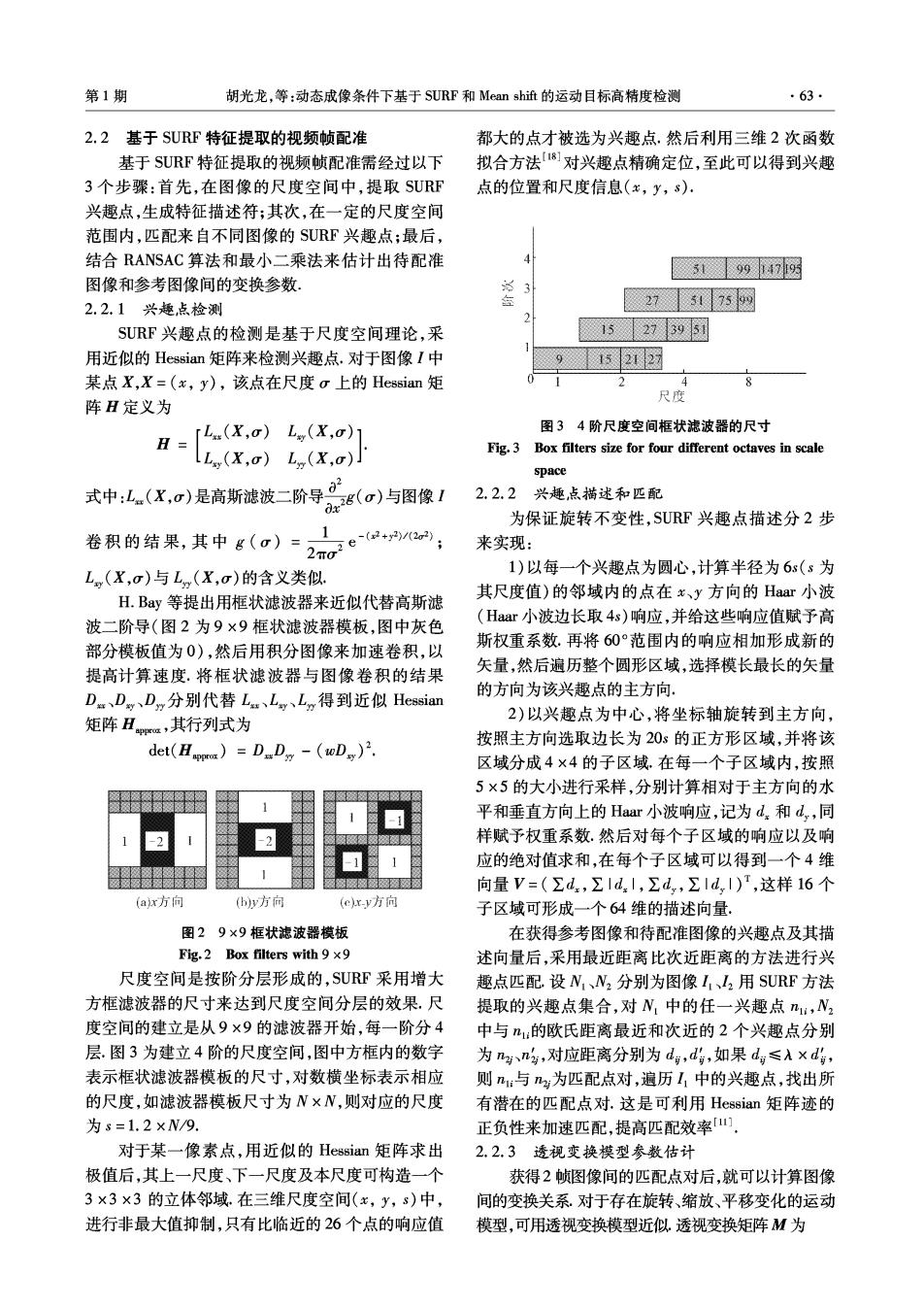
第1期 胡光龙,等:动态成像条件下基于SURF和Mean shift的运动目标高精度检测 63 2.2基于SURF特征提取的视频帧配准 都大的点才被选为兴趣点,然后利用三维2次函数 基于SURF特征提取的视频帧配准需经过以下 拟合方法1对兴趣点精确定位,至此可以得到兴趣 3个步骤:首先,在图像的尺度空间中,提取SURF 点的位置和尺度信息(x,y,s). 兴趣点,生成特征描述符;其次,在一定的尺度空间 范围内,匹配来自不同图像的SURF兴趣点;最后, 结合RANSAC算法和最小二乘法来估计出待配准 4 5994网 图像和参考图像间的变换参数。 3 2.2.1兴趣点检测 盗 2715网 2 SURF兴趣点的检测是基于尺度空间理论,采 152395 用近似的Hessian矩阵来检测兴趣点.对于图像I中 9152127 某点X,X=(x,y),该点在尺度o上的Hessian矩 2 4 阵H定义为 尺度 H- rL(X,o)Lw(X,o)1 图34阶尺度空间框状滤波器的尺寸 Fig.3 Box filters size for four different octaves in scale LL(X,o)Ln(X,o)J space 式中:L.(X,0)是高斯滤波二阶号(o)与图像1 2.2.2兴趣点描述和匹配 为保证旋转不变性,SURF兴趣点描述分2步 卷积的结果,其中g(o)=26r: 1 来实现: 1)以每一个兴趣点为圆心,计算半径为6s(s为 L(X,o)与Ln(X,o)的含义类似. H.Bay等提出用框状滤波器来近似代替高斯滤 其尺度值)的邻域内的点在x、y方向的Haa小波 波二阶导(图2为9×9框状滤波器模板,图中灰色 (Haar小波边长取4s)响应,并给这些响应值赋予高 部分模板值为0),然后用积分图像来加速卷积,以 斯权重系数.再将60°范围内的响应相加形成新的 提高计算速度.将框状滤波器与图像卷积的结果 矢量,然后遍历整个圆形区域,选择模长最长的矢量 的方向为该兴趣点的主方向. Da、Dy、Dy分别代替La、Ly、Ln得到近似Hessian 矩阵Hpm,其行列式为 2)以兴趣点为中心,将坐标轴旋转到主方向, 按照主方向选取边长为20s的正方形区域,并将该 det(Hpm)=DDn-(oD)2. 区域分成4×4的子区域.在每一个子区域内,按照 5×5的大小进行采样,分别计算相对于主方向的水 平和垂直方向上的Haar小波响应,记为d.和d,同 样赋予权重系数.然后对每个子区域的响应以及响 应的绝对值求和,在每个子区域可以得到一个4维 向量V=(∑d,∑Id.l,∑d,∑Id,I)T,这样16个 ax方向 (b)y方向 (cx-y方向 子区域可形成一个64维的描述向量. 图29×9框状滤波器模板 在获得参考图像和待配准图像的兴趣点及其描 Fig.2 Box filters with 9 x9 述向量后,采用最近距离比次近距离的方法进行兴 尺度空间是按阶分层形成的,SURF采用增大 趣点匹配.设N,、N2分别为图像I1、I2用SURF方法 方框滤波器的尺寸来达到尺度空间分层的效果,尺 提取的兴趣点集合,对N,中的任一兴趣点:,W2 度空间的建立是从9×9的滤波器开始,每一阶分4 中与:的欧氏距离最近和次近的2个兴趣点分别 层.图3为建立4阶的尺度空间,图中方框内的数字 为n、n,对应距离分别为d,d,如果d≤入×d, 表示框状滤波器模板的尺寸,对数横坐标表示相应 则n:与n2为匹配点对,遍历L1中的兴趣点,找出所 的尺度,如滤波器模板尺寸为N×N,则对应的尺度 有潜在的匹配点对.这是可利用Hessian矩阵迹的 为s=1.2×N/9. 正负性来加速匹配,提高匹配效率 对于某一像素点,用近似的Hessian矩阵求出 2.2.3透视变换模型参数估计 极值后,其上一尺度、下一尺度及本尺度可构造一个 获得2帧图像间的匹配点对后,就可以计算图像 3×3×3的立体邻域.在三维尺度空间(x,y,s)中, 间的变换关系.对于存在旋转、缩放、平移变化的运动 进行非最大值抑制,只有比临近的26个点的响应值 模型,可用透视变换模型近似透视变换矩阵M为