正在加载图片...
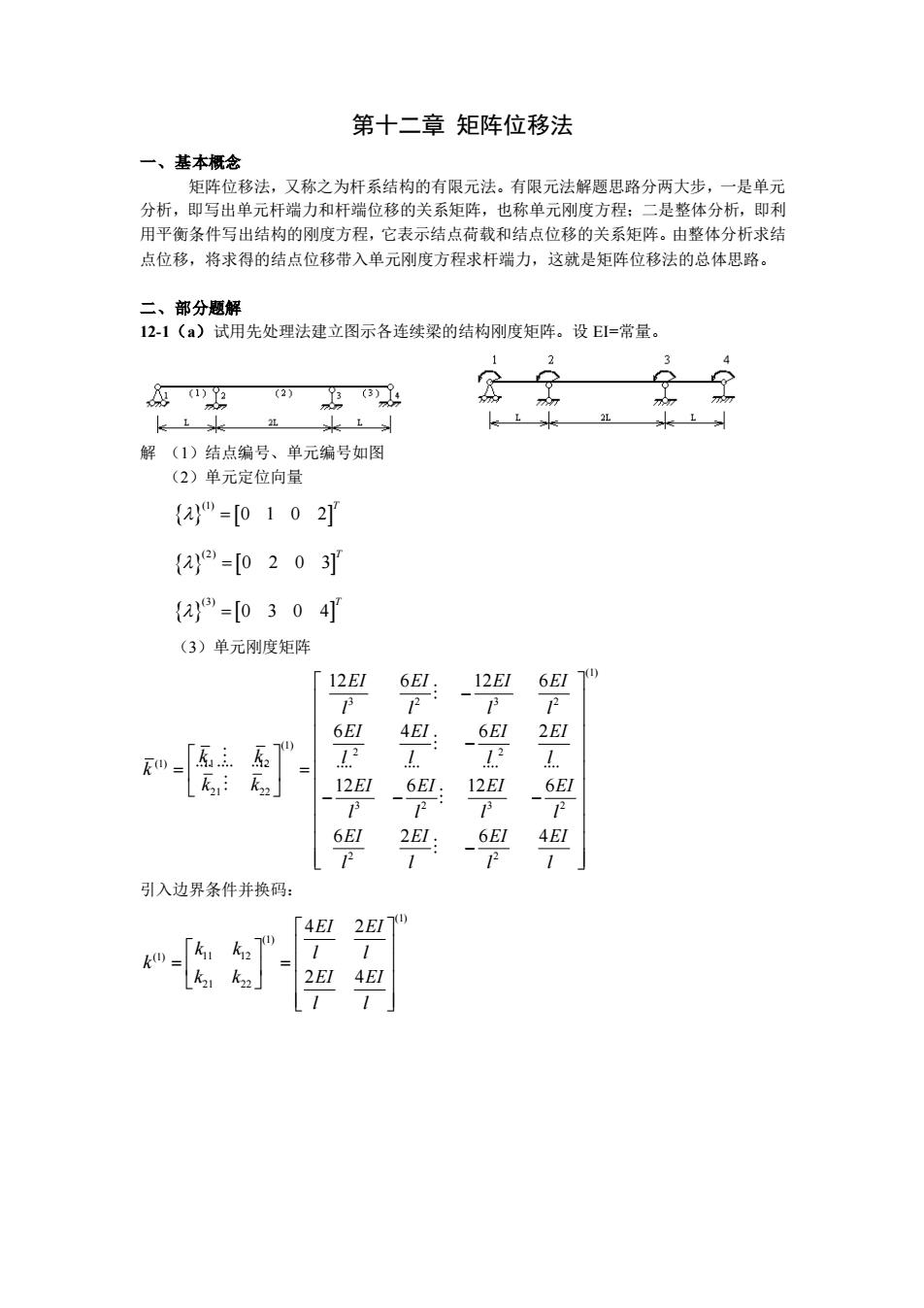
第十二章矩阵位移法 一、基本概念 矩阵位移法,又称之为杆系结构的有限元法。有限元法解题思路分两大步,一是单元 分析,即写出单元杆端力和杆端位移的关系矩阵,也称单元刚度方程:二是整体分析,即利 用平衡条件写出结构的刚度方程,它表示结点荷载和结点位移的关系矩阵。由整体分析求结 点位移,将求得的结点位移带入单元刚度方程求杆端力,这就是矩阵位移法的总体思路。 二、部分题解 12-1(a)试用先处理法建立图示各连续梁的结构刚度矩阵。设E=常量。 1 k上 k上以 解(1)结点编号、单元编号如图 (2)单元定位向量 {ay"=[0102 {242=[0203 {2=[0304 (3)单元刚度矩阵 「12EI 6EI 奖 _12EL 了曲了 迎地了 引入边界条件并换码: k 1 第十二章 矩阵位移法 一、基本概念 矩阵位移法,又称之为杆系结构的有限元法。有限元法解题思路分两大步,一是单元 分析,即写出单元杆端力和杆端位移的关系矩阵,也称单元刚度方程;二是整体分析,即利 用平衡条件写出结构的刚度方程,它表示结点荷载和结点位移的关系矩阵。由整体分析求结 点位移,将求得的结点位移带入单元刚度方程求杆端力,这就是矩阵位移法的总体思路。 二、部分题解 12-1(a)试用先处理法建立图示各连续梁的结构刚度矩阵。设 EI=常量。 解 (1)结点编号、单元编号如图 (2)单元定位向量 (1) 0 1 0 2 T = (2) 0 2 0 3 T = (3) 0 3 0 4 T = (3)单元刚度矩阵 (1) 3 2 3 2 (1) 2 2 (1) 11 12 21 22 3 2 3 2 2 2 12 6 12 6 6 4 6 2 12 6 12 6 6 2 6 4 EI EI EI EI l l l l EI EI EI EI k k l l l l k k k EI EI EI EI l l l l EI EI EI EI l l l l − − = = − − − − 引入边界条件并换码: (1) (1) (1) 11 12 21 22 4 2 2 4 EI EI k k l l k k k EI EI l l = =