正在加载图片...
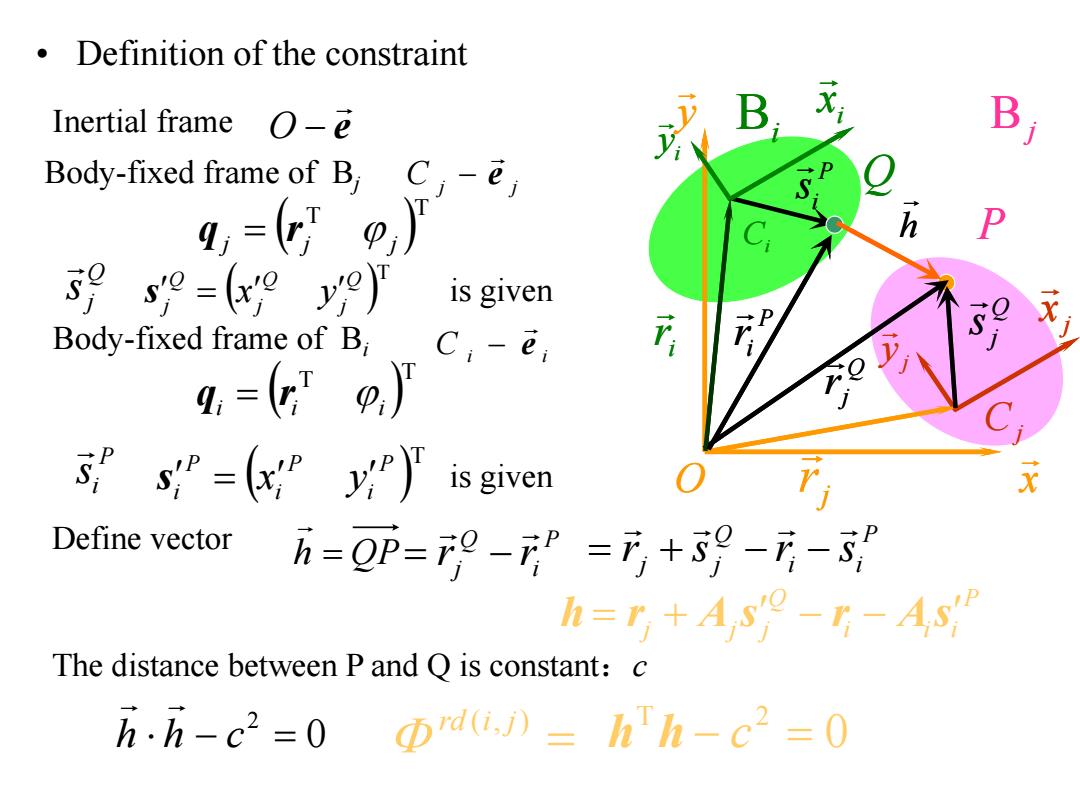
Definition of the constraint Inertial frame O-e B Body-fixed frame of B C, 9,=,) P 9s=(9 is given Body-fixed frame of B, C,-e; 4=9,)厂 5=y)is given Define vector h=0p=9-=时+9--s” h=r+As-r-As The distance between P and Q is constant:c h.h-c2=0 rd(i.i)=hh-c2=0• Definition of the constraint Bj y x O j x j y Cj j r P Q j r Q j s e Inertial frame O C j j e Body-fixed frame of Bj T T j j j q r Q j s Q T j Q j Q j s x y is given P i s T T i i i q r P i s T P i P i P i s x y is given C i i e Body-fixed frame of Bi i x i y Ci Bi ir Q h P ir Define vector h QP P i Q j r r P i i Q j j r s r s P i i i Q j j j h r A s r As 0 2 h h c The distance between P and Q is constant:c 0 T 2 h h c rd (i, j) Bj y x O j x j y Cj j r P Q j r Q j s P i s i x i y Ci Bi ir Q h P ir