正在加载图片...
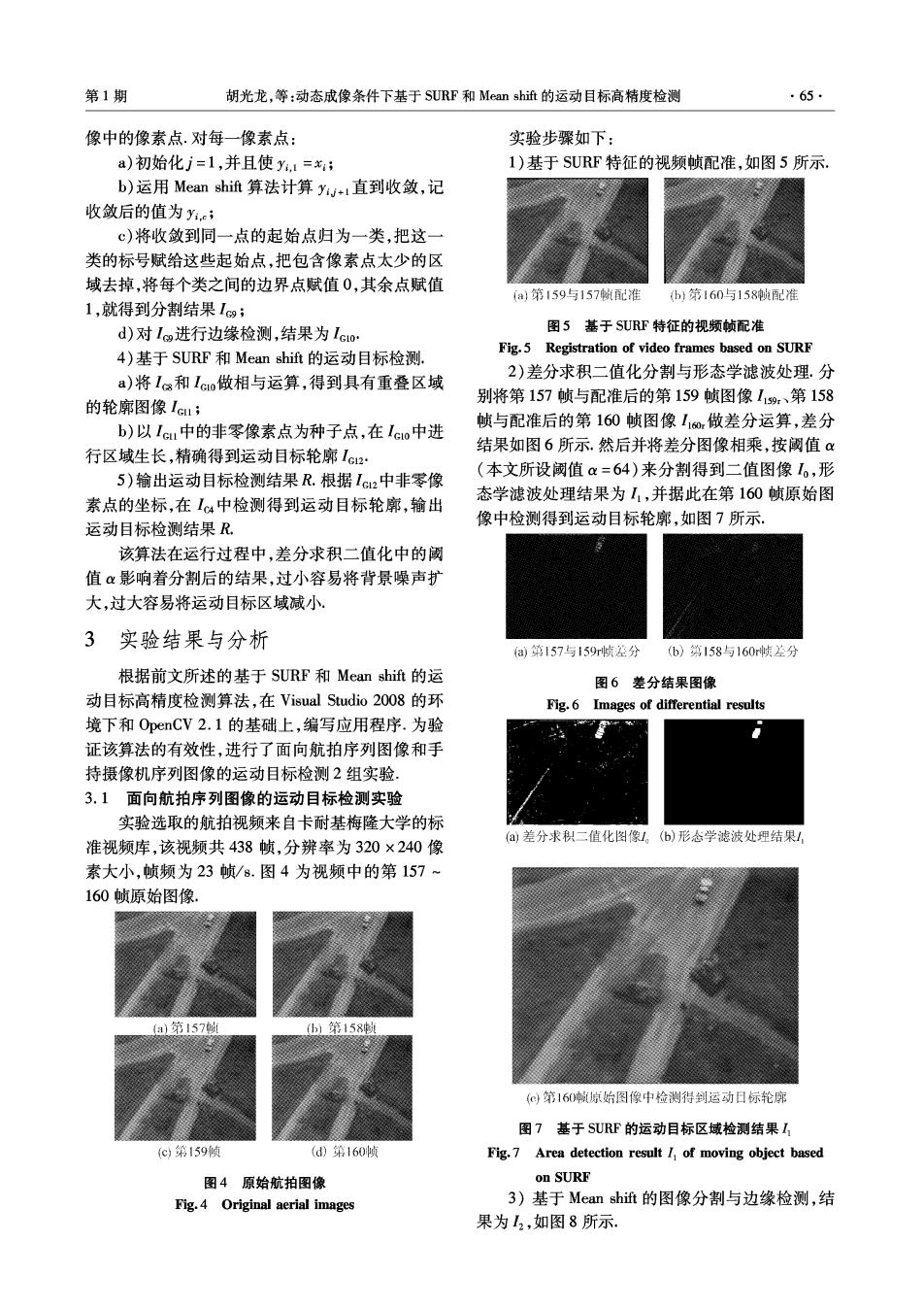
第1期 胡光龙,等:动态成像条件下基于SURF和Mean shift的运动目标高精度检测 ·65 像中的像素点.对每一像素点: 实验步骤如下: a)初始化j=1,并且使y,1=x; 1)基于SURF特征的视频帧配准,如图5所示. b)运用Mean shi讥算法计算yw+i直到收敛,记 收敛后的值为y,c: ©)将收敛到同一点的起始点归为一类,把这一 类的标号赋给这些起始点,把包含像素点太少的区 域去掉,将每个类之间的边界点赋值0,其余点赋值 (a)第159与157懒配准b)第160与158帧配准 1,就得到分割结果Ic9; d)对I进行边缘检测,结果为Ic1o 图5基于SURF特征的视频帧配准 Fig.5 Registration of video frames based on SURF 4)基于SURF和Mean shift的运动目标检测. 2)差分求积二值化分割与形态学滤波处理.分 a)将Ic和Ico做相与运算,得到具有重叠区域 的轮廓图像Ic1; 别将第157帧与配准后的第159帧图像I159.、第158 b)以Ic中的非零像素点为种子点,在Ico中进 帧与配准后的第160帧图像I16.做差分运算,差分 行区域生长,精确得到运动目标轮廓1c2· 结果如图6所示.然后并将差分图像相乘,按阈值α 5)输出运动目标检测结果R.根据Ic2中非零像 (本文所设阈值α=64)来分割得到二值图像1,形 素点的坐标,在Ic4中检测得到运动目标轮廓,输出 态学滤波处理结果为【1,并据此在第160帧原始图 运动目标检测结果R 像中检测得到运动目标轮廓,如图7所示, 该算法在运行过程中,差分求积二值化中的阈 值α影响着分割后的结果,过小容易将背景噪声扩 大,过大容易将运动目标区域减小 3实验结果与分析 a)第I57与159r帧差分 (b)第158与160r帧差分 根据前文所述的基于SURF和Mean shift的运 图6差分结果图像 动目标高精度检测算法,在Visual Studio2008的环 Fig.6 Images of differential results 境下和OpenCV2.1的基础上,编写应用程序.为验 证该算法的有效性,进行了面向航拍序列图像和手 持摄像机序列图像的运动目标检测2组实验. 3.1面向航拍序列图像的运动目标检测实验 实验选取的航拍视频来自卡耐基梅隆大学的标 ()差分求积二值化图像1。(b)形念学滤波处理结果! 准视频库,该视频共438帧,分辨率为320×240像 素大小,帧频为23帧/8.图4为视频中的第157~ 160帧原始图像 (a)第157锁 )第158制 (c)第160惊始图像中检测得到运动日标轮廓 图7基于SURF的运动目标区域检测结果I (c)第159帧 (d)第160帧 Fig.7 Area detection result of moving object based 图4原始航拍图像 on SURF Fig.4 Original aerial images 3)基于Mean shift的图像分割与边缘检测,结 果为2,如图8所示