正在加载图片...
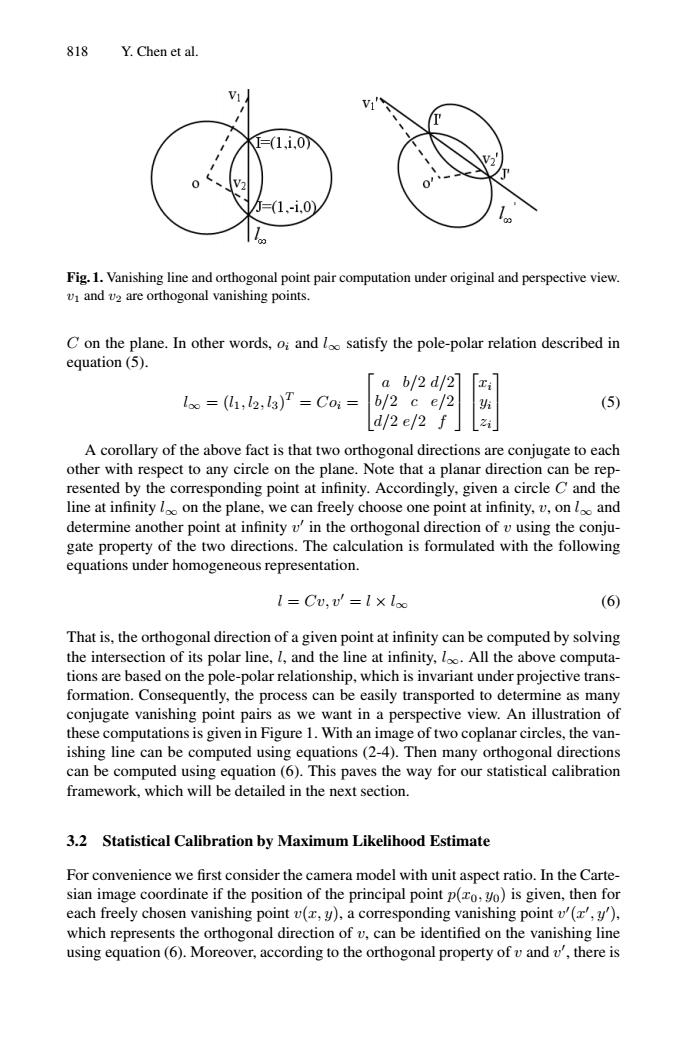
818 Y.Chen et al. 1.-i.0 Fig.1.Vanishing line and orthogonal point pair computation under original and perspective view. ti and vz are orthogonal vanishing points. C on the plane.In other words,o:and l satisfy the pole-polar relation described in equation (5). a b/2 d/2 Ige =(11,12,l3)"=Coi b时/2ce/2 (5) d/2e/2f」 A corollary of the above fact is that two orthogonal directions are conjugate to each other with respect to any circle on the plane.Note that a planar direction can be rep- resented by the corresponding point at infinity.Accordingly.given a circle C and the line at infinity l on the plane,we can freely choose one point at infinity.v.on and determine another point at infinity t'in the orthogonal direction of e using the conju- gate property of the two directions.The calculation is formulated with the following equations under homogeneous representation. I=C,t=【Xlx (6) That is,the orthogonal direction of a given point at infinity can be computed by solving the intersection of its polar line.I,and the line at infinity,l.All the above computa- tions are based on the pole-polar relationship,which is invariant under projective trans- formation.Consequently,the process can be easily transported to determine as many conjugate vanishing point pairs as we want in a perspective view.An illustration of these computations is given in Figure 1.With an image of two coplanar circles,the van- ishing line can be computed using equations (2-4).Then many orthogonal directions can he computed using equation(6).This paves the way for our statistical calibration framework.which will be detailed in the next section. 3.2 Statistical Calibration by Maximum Likelihood Estimate For convenience we first consider the camera model with unit aspect ratio.In the Carte- sian image coordinate if the position of the principal point p(o.o)is given,then for each freely chosen vanishing point v(r,)a corresponding vanishing point '(') which represents the orthogonal direction of v.can be identified on the vanishing line using equation (6).Moreover,according to the orthogonal property of e and u'.there is818 Y. Chen et al. Fig. 1. Vanishing line and orthogonal point pair computation under original and perspective view. v1 and v2 are orthogonal vanishing points. C on the plane. In other words, oi and l∞ satisfy the pole-polar relation described in equation (5). l∞ = (l1, l2, l3) T = Coi = ⎡ ⎣ a b/2 d/2 b/2 c e/2 d/2 e/2 f ⎤ ⎦ ⎡ ⎣ xi yi zi ⎤ ⎦ (5) A corollary of the above fact is that two orthogonal directions are conjugate to each other with respect to any circle on the plane. Note that a planar direction can be represented by the corresponding point at infinity. Accordingly, given a circle C and the line at infinity l∞ on the plane, we can freely choose one point at infinity, v, on l∞ and determine another point at infinity v in the orthogonal direction of v using the conjugate property of the two directions. The calculation is formulated with the following equations under homogeneous representation. l = Cv,v = l × l∞ (6) That is, the orthogonal direction of a given point at infinity can be computed by solving the intersection of its polar line, l, and the line at infinity, l∞. All the above computations are based on the pole-polar relationship, which is invariant under projective transformation. Consequently, the process can be easily transported to determine as many conjugate vanishing point pairs as we want in a perspective view. An illustration of these computations is given in Figure 1. With an image of two coplanar circles, the vanishing line can be computed using equations (2-4). Then many orthogonal directions can be computed using equation (6). This paves the way for our statistical calibration framework, which will be detailed in the next section. 3.2 Statistical Calibration by Maximum Likelihood Estimate For convenience we first consider the camera model with unit aspect ratio. In the Cartesian image coordinate if the position of the principal point p(x0, y0) is given, then for each freely chosen vanishing point v(x, y), a corresponding vanishing point v (x , y ), which represents the orthogonal direction of v, can be identified on the vanishing line using equation (6). Moreover, according to the orthogonal property of v and v , there is������