正在加载图片...
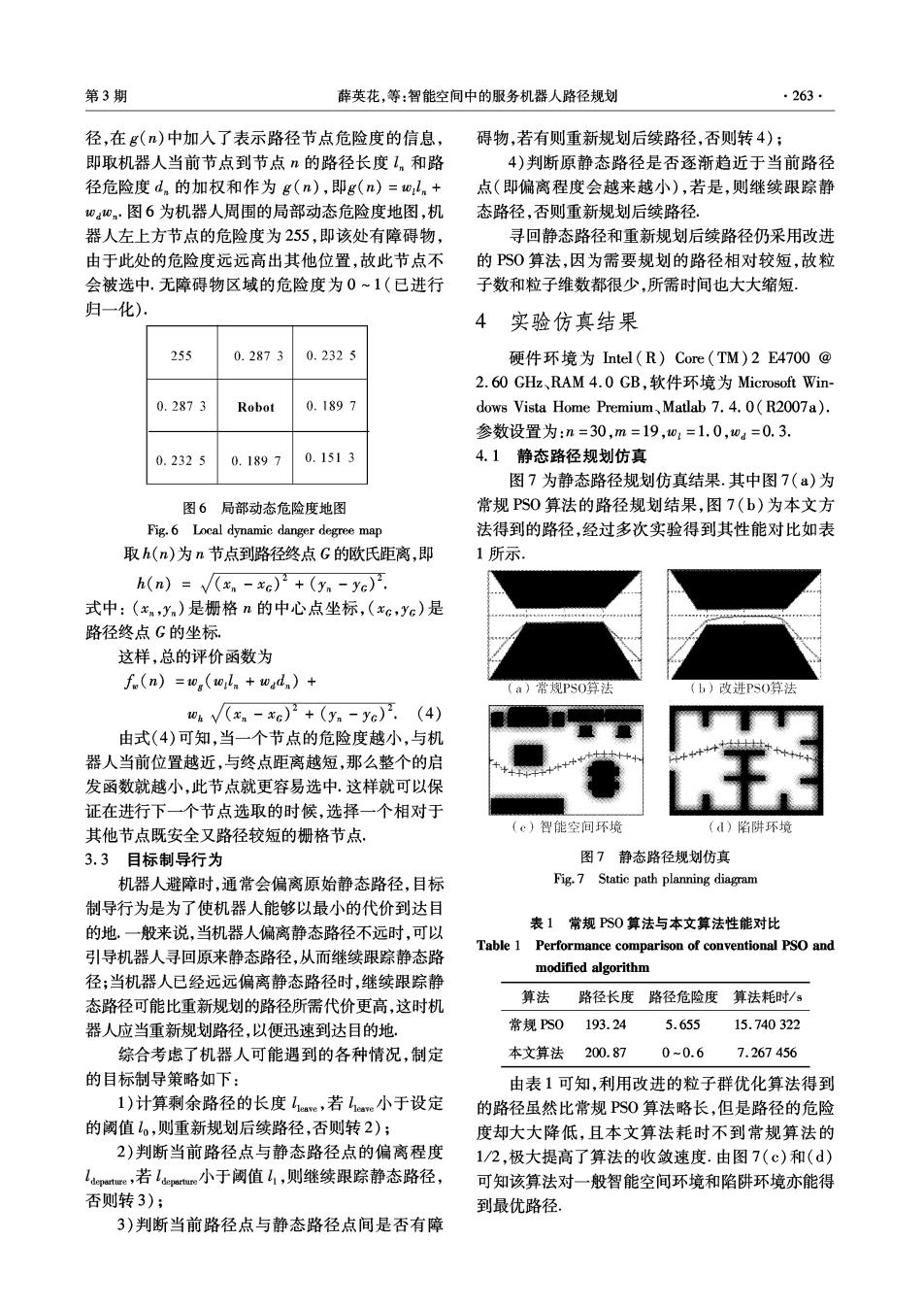
第3期 薛英花,等:智能空间中的服务机器人路径规划 ·263 径,在g(n)中加入了表示路径节点危险度的信息, 碍物,若有则重新规划后续路径,否则转4); 即取机器人当前节点到节点n的路径长度1n和路 4)判断原静态路径是否逐渐趋近于当前路径 径危险度d.的加权和作为g(n),即g(n)=wln+ 点(即偏离程度会越来越小),若是,则继续跟踪静 w:0n·图6为机器人周围的局部动态危险度地图,机 态路径,否则重新规划后续路径. 器人左上方节点的危险度为255,即该处有障碍物, 寻回静态路径和重新规划后续路径仍采用改进 由于此处的危险度远远高出其他位置,故此节点不 的PS0算法,因为需要规划的路径相对较短,故粒 会被选中,无障碍物区域的危险度为0~1(已进行 子数和粒子维数都很少,所需时间也大大缩短 归一化). 4实验仿真结果 255 0.2873 0.2325 硬件环境为ntel(R)Core(TM)2E4700@ 2.60GHz、RAM4.0GB,软件环境为Microsoft Win-- 0.2873 Robot 0.1897 dows Vista Home Premium,Matlab 7.4.0(R2007a). 参数设置为:n=30,m=19,01=1.0,0a=0.3 0.2325 0.1897 0.1513 4.1静态路径规划仿真 图7为静态路径规划仿真结果.其中图7(a)为 图6局部动态危险度地图 常规PS0算法的路径规划结果,图7(b)为本文方 Fig.6 Local dynamic danger degree map 法得到的路径,经过多次实验得到其性能对比如表 取h(n)为n节点到路径终点G的欧氏距离,即 1所示. h(n)=√(,-c)+(yn-yc) 式中:(x,yn)是栅格n的中心点坐标,(xc,yc)是 路径终点G的坐标 这样,总的评价函数为 f.(n)=wg(wl +wad)+ 【a)常规PS0算法 (b)改进PSO算法 h(-%c)+(yn -yc). (4) 由式(4)可知,当一个节点的危险度越小,与机 器人当前位置越近,与终点距离越短,那么整个的启 发函数就越小,此节点就更容易选中.这样就可以保 证在进行下一个节点选取的时候,选择一个相对于 其他节点既安全又路径较短的栅格节点, (c)智能空间环境 (d)陷阱环境 3.3目标制导行为 图7静态路径规划仿真 机器人避障时,通常会偏离原始静态路径,目标 Fig.7 Static path planning diagram 制导行为是为了使机器人能够以最小的代价到达目 的地.一般来说,当机器人偏离静态路径不远时,可以 表1常规PS0算法与本文算法性能对比 Table 1 Performance comparison of conventional PSO and 引导机器人寻回原来静态路径,从而继续跟踪静态路 modified algorithm 径;当机器人已经远远偏离静态路径时,继续跟踪静 态路径可能比重新规划的路径所需代价更高,这时机 算法 路径长度路径危险度算法耗时/s 器人应当重新规划路径,以便迅速到达目的地, 常规PS0193.24 5.655 15.740322 综合考虑了机器人可能遇到的各种情况,制定 本文算法200.87 0-0.6 7.267456 的目标制导策略如下: 由表1可知,利用改进的粒子群优化算法得到 1)计算剩余路径的长度l1ae,若lse小于设定 的路径虽然比常规PS0算法略长,但是路径的危险 的阈值。,则重新规划后续路径,否则转2); 度却大大降低,且本文算法耗时不到常规算法的 2)判断当前路径点与静态路径点的偏离程度 1/2,极大提高了算法的收敛速度.由图7(c)和(d) epe,若departure小于阈值L1,则继续跟踪静态路径, 可知该算法对一般智能空间环境和陷阱环境亦能得 否则转3); 到最优路径. 3)判断当前路径点与静态路径点间是否有障