正在加载图片...
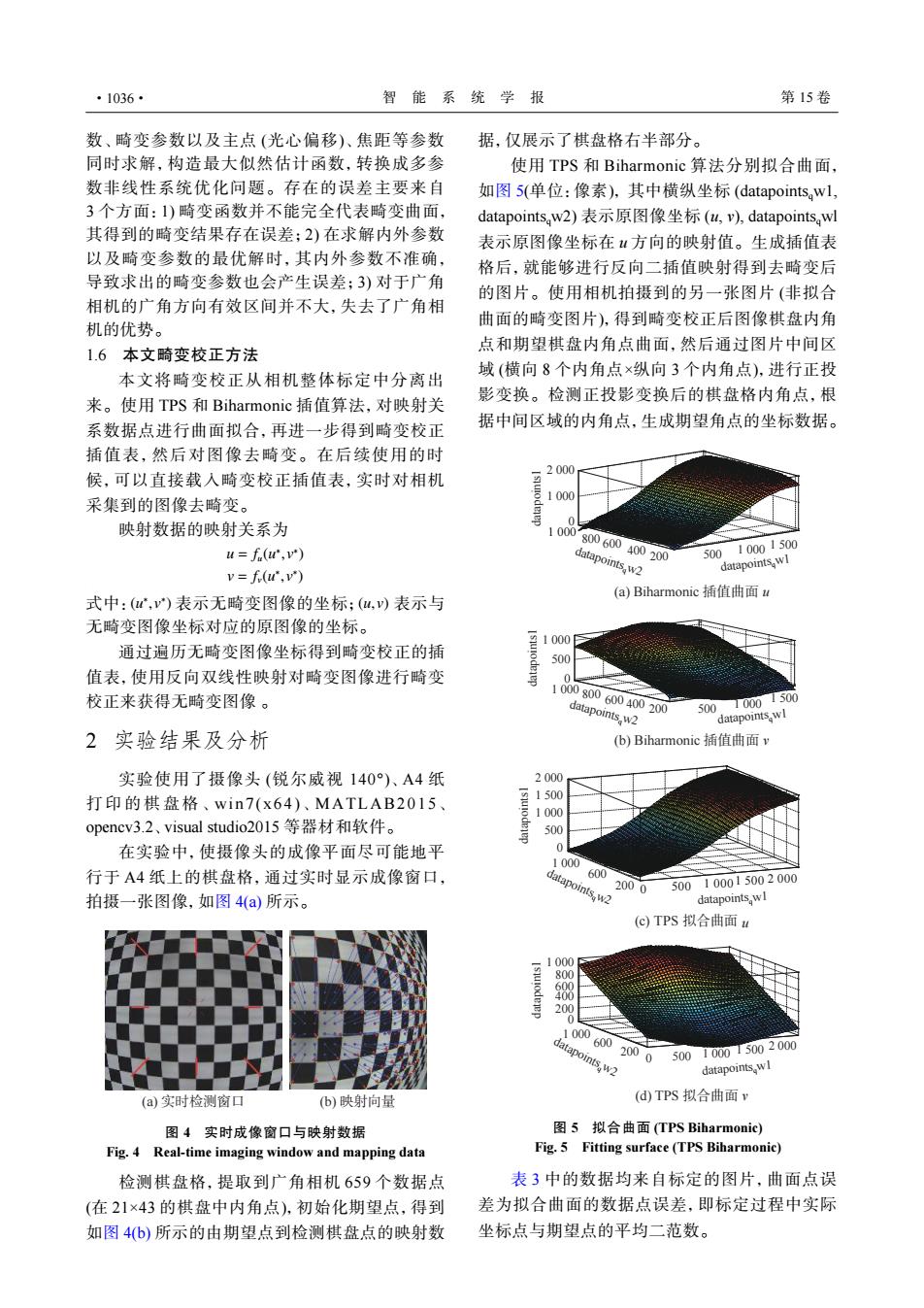
·1036· 智能系统学报 第15卷 数、畸变参数以及主点(光心偏移)、焦距等参数 据,仅展示了棋盘格右半部分。 同时求解,构造最大似然估计函数,转换成多参 使用TPS和Biharmonic算法分别拟合曲面, 数非线性系统优化问题。存在的误差主要来自 如图5(单位:像素),其中横纵坐标(datapoints,wl, 3个方面:1)畸变函数并不能完全代表畸变曲面, datapoints,w2)表示原图像坐标(u,),datapoints,wl 其得到的畸变结果存在误差;2)在求解内外参数 表示原图像坐标在u方向的映射值。生成插值表 以及畸变参数的最优解时,其内外参数不准确, 格后,就能够进行反向二插值映射得到去畸变后 导致求出的畸变参数也会产生误差;3)对于广角 的图片。使用相机拍摄到的另一张图片(非拟合 相机的广角方向有效区间并不大,失去了广角相 机的优势。 曲面的畸变图片),得到畸变校正后图像棋盘内角 1.6本文畸变校正方法 点和期望棋盘内角点曲面,然后通过图片中间区 本文将畸变校正从相机整体标定中分离出 域(横向8个内角点×纵向3个内角点),进行正投 来。使用TPS和Biharmonic插值算法,对映射关 影变换。检测正投影变换后的棋盘格内角点,根 系数据点进行曲面拟合,再进一步得到畸变校正 据中间区域的内角点,生成期望角点的坐标数据。 插值表,然后对图像去畸变。在后续使用的时 候,可以直接载入畸变校正插值表,实时对相机 2000 采集到的图像去畸变。 1000 映射数据的映射关系为 1000 u=f(u,v") 800600400200 datapoints w2 50010001500 datapoints,w v=f(u',v) (a)Biharmonic插值曲面u 式中:(,v)表示无畸变图像的坐标;(u,)表示与 无畸变图像坐标对应的原图像的坐标。 通过遍历无畸变图像坐标得到畸变校正的插 500 值表,使用反向双线性映射对畸变图像进行畸变 校正来获得无畸变图像。 1000800600400200 datapoints,w2 500.10001500 datapoints wl 2实验结果及分析 (b)Biharmonic插值曲面v 实验使用了摄像头(锐尔威视140)、A4纸 2000 打印的棋盘格、win7(x64)、MATLAB2015 1500 1000 opencv3..2、visual studio2015等器材和软件。 500 在实验中,使摄像头的成像平面尽可能地平 0 1000 行于A4纸上的棋盘格,通过实时显示成像窗口, datapoints,w2 600 2000 500100015002000 拍摄一张图像,如图4(a)所示。 datapoints wl (C)TPS拟合曲面u 1 200 1000 datapo 600 oints w2 200 0 500100015002000 datapoints wl (a)实时检测窗口 (b)映射向量 (d)TPs拟合曲面v 图4实时成像窗口与映射数据 图5拟合曲面(TPS Biharmonic) Fig.4 Real-time imaging window and mapping data Fig.5 Fitting surface (TPS Biharmonic) 检测棋盘格,提取到广角相机659个数据点 表3中的数据均来自标定的图片,曲面点误 (在21×43的棋盘中内角点),初始化期望点,得到 差为拟合曲面的数据点误差,即标定过程中实际 如图4(b)所示的由期望点到检测棋盘点的映射数 坐标点与期望点的平均二范数。数、畸变参数以及主点 (光心偏移)、焦距等参数 同时求解,构造最大似然估计函数,转换成多参 数非线性系统优化问题。存在的误差主要来自 3 个方面:1) 畸变函数并不能完全代表畸变曲面, 其得到的畸变结果存在误差;2) 在求解内外参数 以及畸变参数的最优解时,其内外参数不准确, 导致求出的畸变参数也会产生误差;3) 对于广角 相机的广角方向有效区间并不大,失去了广角相 机的优势。 1.6 本文畸变校正方法 本文将畸变校正从相机整体标定中分离出 来。使用 TPS 和 Biharmonic 插值算法,对映射关 系数据点进行曲面拟合,再进一步得到畸变校正 插值表,然后对图像去畸变。在后续使用的时 候,可以直接载入畸变校正插值表,实时对相机 采集到的图像去畸变。 映射数据的映射关系为 u = fu(u ∗ , v ∗ ) v = fv(u ∗ , v ∗ ) (u ∗ , v ∗ 式中: ) 表示无畸变图像的坐标; (u, v) 表示与 无畸变图像坐标对应的原图像的坐标。 通过遍历无畸变图像坐标得到畸变校正的插 值表,使用反向双线性映射对畸变图像进行畸变 校正来获得无畸变图像 。 2 实验结果及分析 实验使用了摄像头 (锐尔威视 140°)、A4 纸 打印的棋盘格、 win7(x64)、 MATLAB2015、 opencv3.2、visual studio2015 等器材和软件。 在实验中,使摄像头的成像平面尽可能地平 行于 A4 纸上的棋盘格,通过实时显示成像窗口, 拍摄一张图像,如图 4(a) 所示。 (a) 实时检测窗口 (b) 映射向量 图 4 实时成像窗口与映射数据 Fig. 4 Real-time imaging window and mapping data 检测棋盘格,提取到广角相机 659 个数据点 (在 21×43 的棋盘中内角点),初始化期望点,得到 如图 4(b) 所示的由期望点到检测棋盘点的映射数 据,仅展示了棋盘格右半部分。 使用 TPS 和 Biharmonic 算法分别拟合曲面, 如图 5(单位:像素), 其中横纵坐标 (datapointsqw1, datapointsqw2) 表示原图像坐标 (u, v), datapointsqwl 表示原图像坐标在 u 方向的映射值。生成插值表 格后,就能够进行反向二插值映射得到去畸变后 的图片。使用相机拍摄到的另一张图片 (非拟合 曲面的畸变图片),得到畸变校正后图像棋盘内角 点和期望棋盘内角点曲面,然后通过图片中间区 域 (横向 8 个内角点×纵向 3 个内角点),进行正投 影变换。检测正投影变换后的棋盘格内角点,根 据中间区域的内角点,生成期望角点的坐标数据。 500 1 000 1 500 200 400 600 800 1 000 0 1 000 2 000 (a) Biharmonic 插值曲面 u datapoints1 datapointsqw2 datapointsqw1 500 1 000 1 500 200 400 600 800 1 000 0 500 1 000 (b) Biharmonic 插值曲面 v datapoints1 datapointsqw2 datapointsqw1 0 500 1 000 1 500 2 000 200 600 1 000 0 500 1 000 1 500 2 000 (c) TPS 拟合曲面 u datapoints1 datapointsqw2 datapointsqw1 0 500 1 000 1 500 2 000 200 600 1 000 0 200 400 600 800 1 000 (d) TPS 拟合曲面 v datapoints1 datapointsqw2 datapointsqw1 图 5 拟合曲面 (TPS Biharmonic) Fig. 5 Fitting surface (TPS Biharmonic) 表 3 中的数据均来自标定的图片,曲面点误 差为拟合曲面的数据点误差,即标定过程中实际 坐标点与期望点的平均二范数。 ·1036· 智 能 系 统 学 报 第 15 卷