正在加载图片...
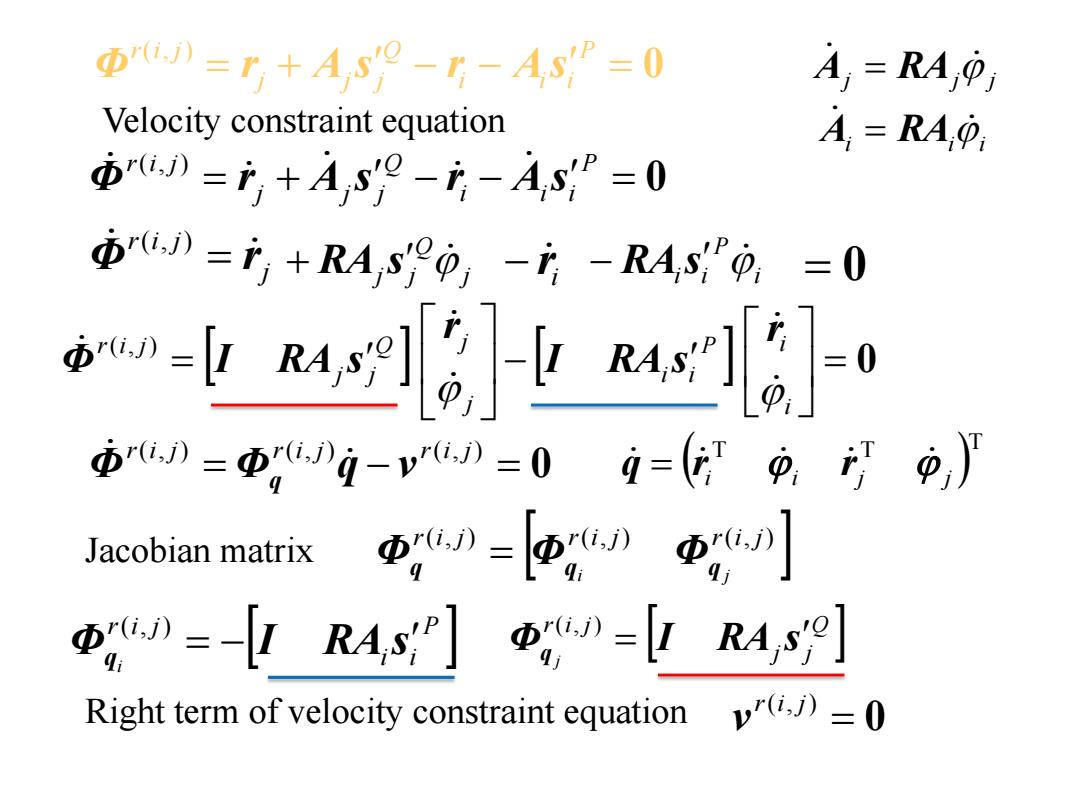
Φw)=T+A,s-片-A5y=0 A =RA Velocity constraint equation A=RAO 》=f+Asye--As”=0 重》=产+R4,s0-店-RAs,0, =0 -646业46-。 w=电,i-v》=09=(9p,) Jacobian matrix 更》=西》中列 ,》=-[R4s]Φ,D=R4s9] Right term of velocity constraint equation y"(ij)=0j j j A RA j r i j Φ r ( , ) 0 P i i i Q j j j r i j Φ r A s r As ( , ) 0 P i i i Q j j j r i j Φ r A s r A s ( , ) 0 • Velocity constraint equation • Jacobian matrix 0 r(i, j) r(i, j) r(i, j) Φ Φ q v q i ii A RA j Q RAjs j i r i P RAisi T T T i i j j q r r r(i, j) r(i, j) r(i, j) q qi q j Φ Φ Φ 0 i P i i i j Q j j j r i j r I RA s r Φ I RA s ( , ) Q j j r i j j Φ I RA s q ( , ) P i i r i j i Φ I RA s q ( , ) • Right term of velocity constraint equation 0 r(i, j) v