正在加载图片...
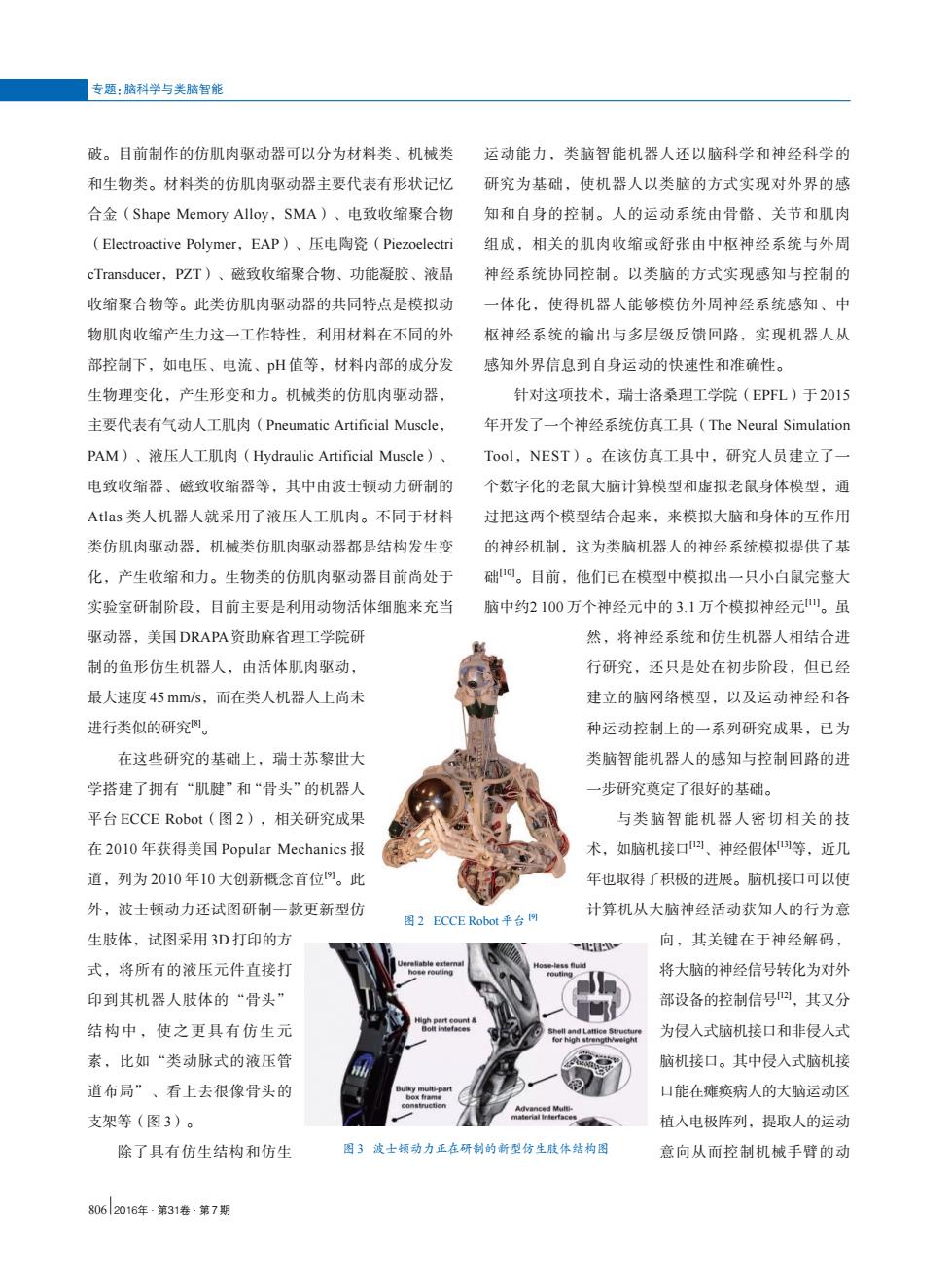
专题:脑科学与类脑智能 破。目前制作的仿肌肉驱动器可以分为材料类、机械类 运动能力,类脑智能机器人还以脑科学和神经科学的 和生物类。材料类的仿肌肉驱动器主要代表有形状记忆 研究为基础,使机器人以类脑的方式实现对外界的感 合金(Shape Memory Alloy,SMA),电致收缩聚合物 知和自身的控制。人的运动系统由骨酪、关节和肌肉 (Electroactive Polymer,EAP)、压电陶瓷(Piezoelectri 组成,相关的肌肉收缩或舒张由中枢神经系统与外周 cTransducer.PZT)、磁致收缩聚合物、功能凝胶、液晶 神经系统协同控制。以类脑的方式实现感知与控制的 收缩聚合物等。此类仿肌肉驱动器的共同特点是模拟动 一体化,使得机器人能够模仿外周神经系统感知、中 物肌肉收缩产生力这一工作特性,利用材料在不同的外 枢神经系统的输出与多层级反馈回路,实现机器人从 部控制下,如电压、电流、pH值等,材料内部的成分发 感知外界信息到自身运动的快速性和准确性。 生物理变化,产生形变和力。机械类的仿肌肉墅动器, 针对这项技术,瑞士洛桑理工学院(EPFL)于201 主要代表有气动人工肌肉(Pneumatic Artificial Muscle, 年开发了一个神经系统仿直工具(The Neural Simulation PAM)、液压人工肌肉(Hydraulic Artificial Muscle)、 Tool,NEST)。在该仿真工具中,研究人员建立了一 电致收缩器、磁致收缩器等,其中由波士顿动力研制的 个数字化的老鼠大脑计算模型和虚拟老鼠身体模型,通 Alas类人机器人就采用了液压人工肌肉。不同于材料 过把这两个模型结合起来,来模拟大脑和身体的互作用 类仿肌肉驱动器,机械类仿肌肉驱动器都是结构发生变 的神经机制,这为类脑机器人的神经系统模拟提供了基 化,产生收缩和力。生物类的仿肌肉驱动器目前尚处于 础。目前,他们已在模型中模拟出一只小白鼠完整大 实验室研制阶段,目前主要是利用动物活体细胞来充当 脑中约2100万个神经元中的3.1万个模拟神经元。虽 驱动器,类国DRAPA资助麻省理工学院研 然,将神经系统和仿生机器人相结合进 制的鱼形仿生机器人,由活体肌肉驱动, 行研究,不只是处在初步阶段,但已经 最大速度45mms.而在类人机器人上尚末 建立的脑网络模型,以及运动神经和各 进行类似的研究州。 种运动控制上的一系列研究成果,已为 在这些研究的基础上,瑞士苏黎世大 类脑智能机器人的感知与控制回路的进 学搭建了拥有“肌腱”和“骨头“的机器人 一步研究莫定了很好的基础。 平台ECCE Robot(图2),相关研究成果 与类脑智能机器人密切相关的技 在2010年获得美国Popular Mechanics报 术,如脑机接口阿、神经假体列等,近几 道,列为2010年10大创新概念首位网。此 年也取得了积极的进展。脑机接口可以使 外,波士顿动力还试图研制一款更新型仿 计算机从大脑神经活动获知人的行为意 生肢体,试图采用3D打印的方 向,其关键在于神经解码, 式,将所有的液压元件直接打 将大脑的神经信号转化为对外 印到其机器人肢体的“骨头 部设备的控制信号四,其又分 结构中,使之更具有仿生元 为侵人式脑机接口和非侵人式 素,比如“类动脉式的液压管 脑机接口。其中侵入式脑机接 道布局”、看上去很像骨头的 口能在庭疏病人的大脑运动凤 支架等(图3)。 植入电极阵列,提取人的运动 除了具有仿生结构和仿生 国3波士顿动力正在研制的新型 意向从而控制机械手臂的动 8062016年第31卷第7期806 2016年 . 第31卷 . 第 7期 专题:脑科学与类脑智能 破。目前制作的仿肌肉驱动器可以分为材料类、机械类 和生物类。材料类的仿肌肉驱动器主要代表有形状记忆 合金(Shape Memory Alloy,SMA)、电致收缩聚合物 (Electroactive Polymer,EAP)、压电陶瓷(Piezoelectri cTransducer,PZT)、磁致收缩聚合物、功能凝胶、液晶 收缩聚合物等。此类仿肌肉驱动器的共同特点是模拟动 物肌肉收缩产生力这一工作特性,利用材料在不同的外 部控制下,如电压、电流、pH 值等,材料内部的成分发 生物理变化,产生形变和力。机械类的仿肌肉驱动器, 主要代表有气动人工肌肉(Pneumatic Artificial Muscle, PAM)、液压人工肌肉(Hydraulic Artificial Muscle)、 电致收缩器、磁致收缩器等,其中由波士顿动力研制的 Atlas 类人机器人就采用了液压人工肌肉。不同于材料 类仿肌肉驱动器,机械类仿肌肉驱动器都是结构发生变 化,产生收缩和力。生物类的仿肌肉驱动器目前尚处于 实验室研制阶段,目前主要是利用动物活体细胞来充当 驱动器,美国 DRAPA 资助麻省理工学院研 制的鱼形仿生机器人,由活体肌肉驱动, 最大速度 45 mm/s,而在类人机器人上尚未 进行类似的研究[8]。 在这些研究的基础上,瑞士苏黎世大 学搭建了拥有“肌腱”和“骨头”的机器人 平台 ECCE Robot(图 2),相关研究成果 在 2010 年获得美国 Popular Mechanics 报 道,列为 2010 年10 大创新概念首位[9]。此 外,波士顿动力还试图研制一款更新型仿 生肢体,试图采用 3D 打印的方 式,将所有的液压元件直接打 印到其机器人肢体的“骨头” 结构中,使之更具有仿生元 素,比如“类动脉式的液压管 道布局”、看上去很像骨头的 支架等(图 3)。 除了具有仿生结构和仿生 运动能力,类脑智能机器人还以脑科学和神经科学的 研究为基础,使机器人以类脑的方式实现对外界的感 知和自身的控制。人的运动系统由骨骼、关节和肌肉 组成,相关的肌肉收缩或舒张由中枢神经系统与外周 神经系统协同控制。以类脑的方式实现感知与控制的 一体化,使得机器人能够模仿外周神经系统感知、中 枢神经系统的输出与多层级反馈回路,实现机器人从 感知外界信息到自身运动的快速性和准确性。 针对这项技术,瑞士洛桑理工学院(EPFL)于 2015 年开发了一个神经系统仿真工具(The Neural Simulation Tool,NEST)。在该仿真工具中,研究人员建立了一 个数字化的老鼠大脑计算模型和虚拟老鼠身体模型,通 过把这两个模型结合起来,来模拟大脑和身体的互作用 的神经机制,这为类脑机器人的神经系统模拟提供了基 础[10]。目前,他们已在模型中模拟出一只小白鼠完整大 脑中约2 100 万个神经元中的 3.1 万个模拟神经元[11]。虽 然,将神经系统和仿生机器人相结合进 行研究,还只是处在初步阶段,但已经 建立的脑网络模型,以及运动神经和各 种运动控制上的一系列研究成果,已为 类脑智能机器人的感知与控制回路的进 一步研究奠定了很好的基础。 与类脑智能机器人密切相关的技 术,如脑机接口[12]、神经假体[13]等,近几 年也取得了积极的进展。脑机接口可以使 计算机从大脑神经活动获知人的行为意 向,其关键在于神经解码, 将大脑的神经信号转化为对外 部设备的控制信号[12],其又分 为侵入式脑机接口和非侵入式 脑机接口。其中侵入式脑机接 口能在瘫痪病人的大脑运动区 植入电极阵列,提取人的运动 意向从而控制机械手臂的动 图 2 ECCE Robot 平台 [9] 图 3 波士顿动力正在研制的新型仿生肢体结构图