正在加载图片...
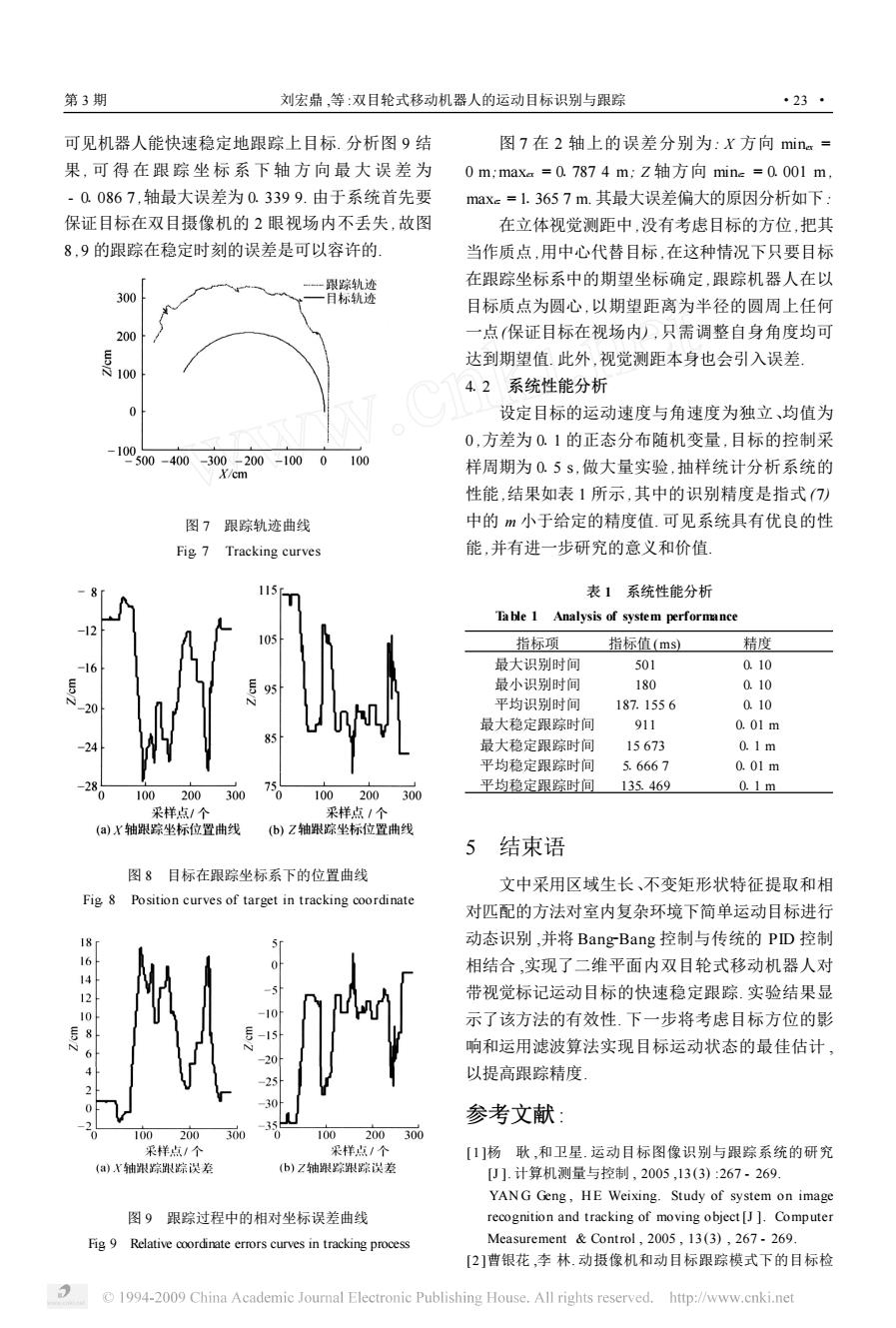
第3期 刘宏鼎,等:双目轮式移动机器人的运动目标识别与跟踪 ·23· 可见机器人能快速稳定地跟踪上目标.分析图9结 图7在2轴上的误差分别为:X方向mina= 果,可得在跟踪坐标系下轴方向最大误差为 0m,maxa=0.7874m;Z轴方向minc=0.001m, -0.0867,轴最大误差为0.3399.由于系统首先要 maxc-1.3657m.其最大误差偏大的原因分析如下: 保证目标在双目摄像机的2眼视场内不丢失,故图 在立体视觉测距中,没有考虑目标的方位,把其 8.9的跟踪在稳定时刻的误差是可以容许的 当作质点,用中心代替目标,在这种情况下只要目标 跟踪轨迹 在跟踪坐标系中的期望坐标确定,跟踪机器人在以 300 目标轨迹 目标质点为圆心,以期望距离为半径的圆周上任何 200 一点(保证目标在视场内),只需调整自身角度均可 达到期望值.此外,视觉测距本身也会引入误差 100 4.2系统性能分析 0 设定目标的运动速度与角速度为独立、均值为 0,方差为0.1的正态分布随机变量,目标的控制采 -10 500-400-300-200-1000100 X/cm 样周期为0.5s,做大量实验,抽样统计分析系统的 性能,结果如表1所示,其中的识别精度是指式门) 图7跟踪轨迹曲线 中的m小于给定的精度值.可见系统具有优良的性 Fig 7 Tracking curves 能,并有进一步研究的意义和价值 115 表1系统性能分析 Table 1 Analysis of system performance 105 指标项 指标值(ms) 精度 最大识别时间 501 0.10 最小识别时间 180 0.10 平均识别时间 187.1556 0.10 最大稳定跟踪时间 911 0.01m 最大稳定跟踪时间 15673 0.1m 平均稳定跟踪时间 5.6667 0.01m 平均稳定跟踪时间 135.469 0.1m 100 200 300 100 200 300 采样点/个 采样点/个 (a)X轴跟踪坐标位置曲线 (b)Z轴跟踪坐标位置曲线 结束语 图8目标在跟踪坐标系下的位置曲线 文中采用区域生长、不变矩形状特征提取和相 Fig 8 Position curves of target in tracking coordinate 对匹配的方法对室内复杂环境下简单运动目标进行 动态识别,并将Bang-Bang控制与传统的PD控制 相结合,实现了二维平面内双目轮式移动机器人对 带视觉标记运动目标的快速稳定跟踪.实验结果显 示了该方法的有效性.下一步将考虑目标方位的影 响和运用滤波算法实现目标运动状态的最佳估计, 20 以提高跟踪精度 30 参考文献: 100200 300 100 200 300 采样点/个 采样点/个 [1]杨耿,和卫星.运动目标图像识别与跟踪系统的研究 (a)X轴跟踪跟踪误美 (b)Z轴跟踪跟踪误差 [U].计算机测量与控制,2005,13(3):267-269 YANG Geng,HE Weixing.Study of system on image 图9跟踪过程中的相对坐标误差曲线 recognition and tracking of moving object [J ]Computer Fig 9 Relative coordinate errors curves in tracking process Measurement Control,2005,13(3),267-269. [2]曹银花,李林.动摄像机和动目标跟踪模式下的目标检 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net可见机器人能快速稳定地跟踪上目标. 分析图 9 结 果 , 可 得 在 跟 踪 坐 标 系 下 轴 方 向 最 大 误 差 为 - 01086 7 ,轴最大误差为 01339 9. 由于系统首先要 保证目标在双目摄像机的 2 眼视场内不丢失 ,故图 8 ,9 的跟踪在稳定时刻的误差是可以容许的. 图 7 跟踪轨迹曲线 Fig17 Tracking curves 图 8 目标在跟踪坐标系下的位置曲线 Fig18 Position curves of target in tracking coordinate 图 9 跟踪过程中的相对坐标误差曲线 Fig19 Relative coordinate errors curves in tracking process 图 7 在 2 轴上的误差分别为: X 方向 minex = 0 m;maxex = 01787 4 m; Z 轴方向 minez = 01001 m , maxez = 11365 7 m. 其最大误差偏大的原因分析如下: 在立体视觉测距中 ,没有考虑目标的方位 ,把其 当作质点 ,用中心代替目标 ,在这种情况下只要目标 在跟踪坐标系中的期望坐标确定 ,跟踪机器人在以 目标质点为圆心 ,以期望距离为半径的圆周上任何 一点(保证目标在视场内) ,只需调整自身角度均可 达到期望值. 此外 ,视觉测距本身也会引入误差. 412 系统性能分析 设定目标的运动速度与角速度为独立、均值为 0 ,方差为 011 的正态分布随机变量 ,目标的控制采 样周期为 015 s,做大量实验 ,抽样统计分析系统的 性能 ,结果如表 1 所示 ,其中的识别精度是指式 (7) 中的 m 小于给定的精度值. 可见系统具有优良的性 能 ,并有进一步研究的意义和价值. 表 1 系统性能分析 Table 1 Analysis of system performance 指标项 指标值(ms) 精度 最大识别时间 501 0110 最小识别时间 180 0110 平均识别时间 1871155 6 0110 最大稳定跟踪时间 911 0101 m 最大稳定跟踪时间 15 673 011 m 平均稳定跟踪时间 51666 7 0101 m 平均稳定跟踪时间 1351469 011 m 5 结束语 文中采用区域生长、不变矩形状特征提取和相 对匹配的方法对室内复杂环境下简单运动目标进行 动态识别 ,并将 Bang2Bang 控制与传统的 PID 控制 相结合 ,实现了二维平面内双目轮式移动机器人对 带视觉标记运动目标的快速稳定跟踪. 实验结果显 示了该方法的有效性. 下一步将考虑目标方位的影 响和运用滤波算法实现目标运动状态的最佳估计 , 以提高跟踪精度. 参考文献 : [1 ]杨 耿 ,和卫星. 运动目标图像识别与跟踪系统的研究 [J ]. 计算机测量与控制 , 2005 ,13 (3) :267 - 269. YAN G Geng , HE Weixing. Study of system on image recognition and tracking of moving object [J ]. Computer Measurement & Control , 2005 , 13 (3) , 267 - 269. [2 ]曹银花 ,李 林. 动摄像机和动目标跟踪模式下的目标检 第 3 期 刘宏鼎 ,等 :双目轮式移动机器人的运动目标识别与跟踪 ·23 ·