正在加载图片...
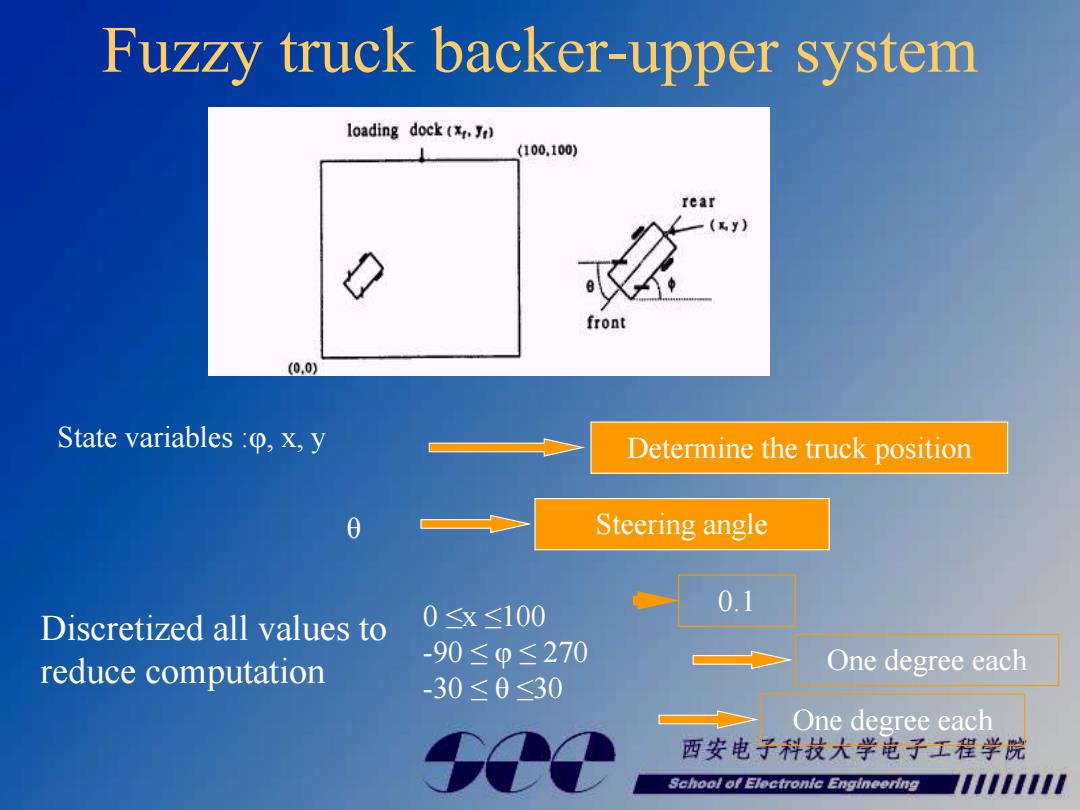
Fuzzy truck backer-upper system loading dock (x.J) (100,100) rear 一(%y) front (0.0】 State variables :x,y Determine the truck position Steering angle 0≤x≤100 0.1 Discretized all values to -90≤0≤270 reduce computation One degree each -30≤0≤30 One degree each 2 西安电子科技大学屯子工程学院 School of Electronte Engineering 1111111State variables :φ, x, y θ Steering angle Determine the truck position 0 ≤x ≤100 -90 ≤ φ ≤ 270 -30 ≤ θ ≤30 0.1 One degree each One degree each Discretized all values to reduce computation Fuzzy truck backer-upper system