正在加载图片...
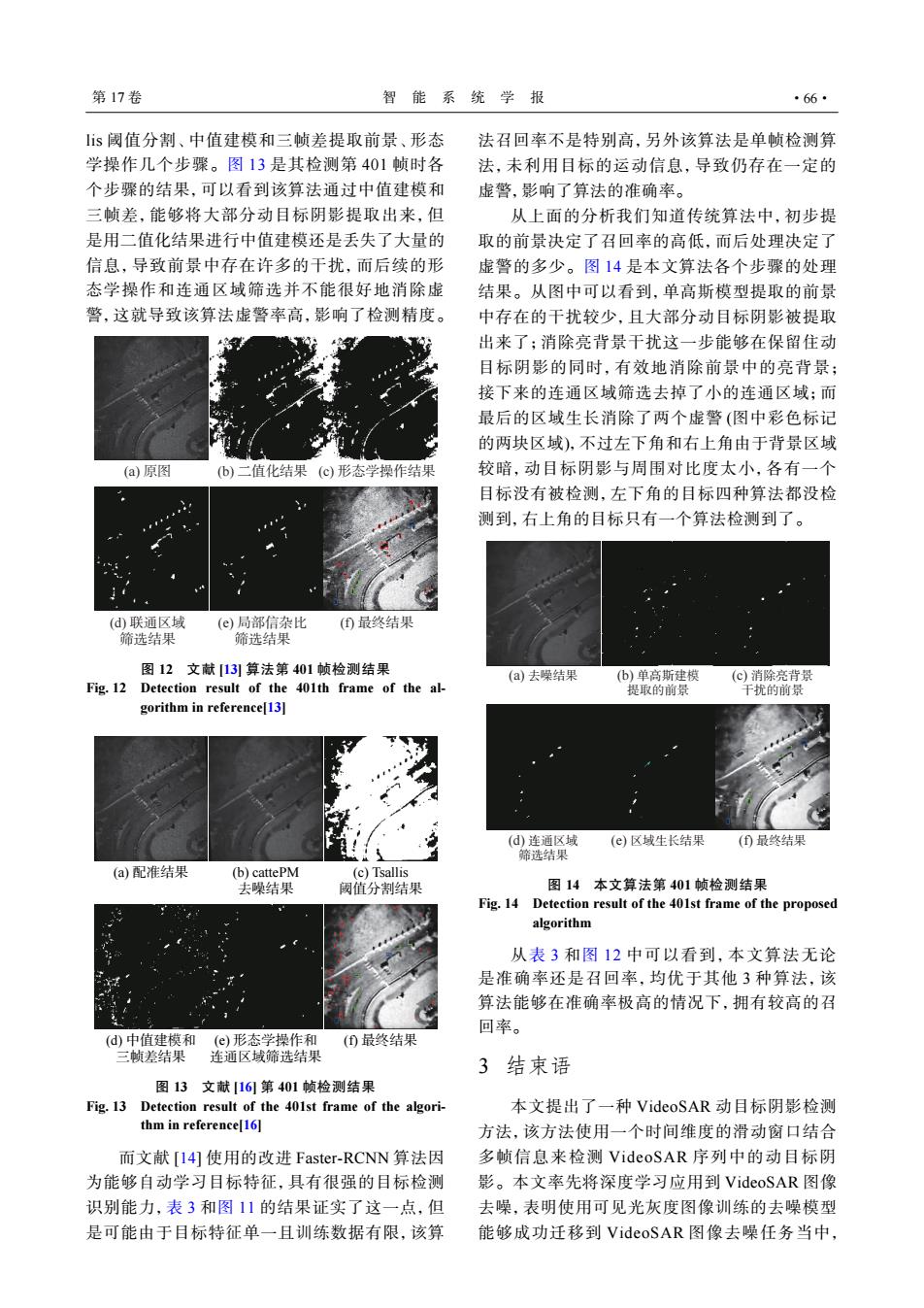
第17卷 智能系统学报 ·66· Is阈值分割、中值建模和三帧差提取前景、形态 法召回率不是特别高,另外该算法是单帧检测算 学操作几个步骤。图13是其检测第401帧时各 法,未利用目标的运动信息,导致仍存在一定的 个步骤的结果,可以看到该算法通过中值建模和 虚警,影响了算法的准确率。 三帧差,能够将大部分动目标阴影提取出来,但 从上面的分析我们知道传统算法中,初步提 是用二值化结果进行中值建模还是丢失了大量的 取的前景决定了召回率的高低,而后处理决定了 信息,导致前景中存在许多的干扰,而后续的形 虚警的多少。图14是本文算法各个步骤的处理 态学操作和连通区域筛选并不能很好地消除虚 结果。从图中可以看到,单高斯模型提取的前景 警,这就导致该算法虚警率高,影响了检测精度。 中存在的干扰较少,且大部分动目标阴影被提取 出来了;消除亮背景干扰这一步能够在保留住动 目标阴影的同时,有效地消除前景中的亮背景; 接下来的连通区域筛选去掉了小的连通区域;而 最后的区域生长消除了两个虚警(图中彩色标记 的两块区域),不过左下角和右上角由于背景区域 (a)原图 (b)二值化结果(c)形态学操作结果 较暗,动目标阴影与周围对比度太小,各有一个 目标没有被检测,左下角的目标四种算法都没检 测到,右上角的目标只有一个算法检测到了。 (d联通区域 (©)局部信杂比(①最终结果 筛选结果 筛选结果 图12文献[13算法第401帧检测结果 (a)去噪结果 (b)单高斯建模 (c)消除亮背景 Fig.12 Detection result of the 401th frame of the al- 提取的前景 干扰的前景 gorithm in reference[13] (d连通区域 (©)区域生长结果 ()最终结果 筛选结果 (a)配准结果 (b)cattePM (c)Tsallis 去噪结果 阈值分割结果 图14本文算法第401帧检测结果 1 Fig.14 Detection result of the 401st frame of the proposed algorithm 1 从表3和图12中可以看到,本文算法无论 是准确率还是召回率,均优于其他3种算法,该 算法能够在准确率极高的情况下,拥有较高的召 回率。 (d)中值建模和(e)形态学操作和 (①最终结果 三帧差结果 连通区域筛选结果 3结束语 图13文献16第401帧检测结果 Fig.13 Detection result of the 401st frame of the algori- 本文提出了一种VideoSAR动目标阴影检测 thm in reference16] 方法,该方法使用一个时间维度的滑动窗口结合 而文献[I4]使用的改进Faster-RCNN算法因 多帧信息来检测VideoSAR序列中的动目标阴 为能够自动学习目标特征,具有很强的目标检测 影。本文率先将深度学习应用到VideoSAR图像 识别能力,表3和图11的结果证实了这一点,但 去噪,表明使用可见光灰度图像训练的去噪模型 是可能由于目标特征单一且训练数据有限,该算 能够成功迁移到VideoSAR图像去噪任务当中,lis 阈值分割、中值建模和三帧差提取前景、形态 学操作几个步骤。图 13 是其检测第 401 帧时各 个步骤的结果,可以看到该算法通过中值建模和 三帧差,能够将大部分动目标阴影提取出来,但 是用二值化结果进行中值建模还是丢失了大量的 信息,导致前景中存在许多的干扰,而后续的形 态学操作和连通区域筛选并不能很好地消除虚 警,这就导致该算法虚警率高,影响了检测精度。 (a) 原图 (b) 二值化结果 (c) 形态学操作结果 (d) 联通区域 筛选结果 (e) 局部信杂比 筛选结果 (f) 最终结果 图 12 文献 [13] 算法第 401 帧检测结果 Fig. 12 Detection result of the 401th frame of the algorithm in reference[13] (a) 配准结果 (b) cattePM 去噪结果 (c) Tsallis 阈值分割结果 (d) 中值建模和 三帧差结果 (e) 形态学操作和 连通区域筛选结果 (f) 最终结果 图 13 文献 [16] 第 401 帧检测结果 Fig. 13 Detection result of the 401st frame of the algorithm in reference[16] 而文献 [14] 使用的改进 Faster-RCNN 算法因 为能够自动学习目标特征,具有很强的目标检测 识别能力,表 3 和图 11 的结果证实了这一点,但 是可能由于目标特征单一且训练数据有限,该算 法召回率不是特别高,另外该算法是单帧检测算 法,未利用目标的运动信息,导致仍存在一定的 虚警,影响了算法的准确率。 从上面的分析我们知道传统算法中,初步提 取的前景决定了召回率的高低,而后处理决定了 虚警的多少。图 14 是本文算法各个步骤的处理 结果。从图中可以看到,单高斯模型提取的前景 中存在的干扰较少,且大部分动目标阴影被提取 出来了;消除亮背景干扰这一步能够在保留住动 目标阴影的同时,有效地消除前景中的亮背景; 接下来的连通区域筛选去掉了小的连通区域;而 最后的区域生长消除了两个虚警 (图中彩色标记 的两块区域),不过左下角和右上角由于背景区域 较暗,动目标阴影与周围对比度太小,各有一个 目标没有被检测,左下角的目标四种算法都没检 测到,右上角的目标只有一个算法检测到了。 (d) 连通区域 筛选结果 (e) 区域生长结果 (f) 最终结果 (a) 去噪结果 (b) 单高斯建模 提取的前景 (c) 消除亮背景 干扰的前景 图 14 本文算法第 401 帧检测结果 Fig. 14 Detection result of the 401st frame of the proposed algorithm 从表 3 和图 12 中可以看到,本文算法无论 是准确率还是召回率,均优于其他 3 种算法,该 算法能够在准确率极高的情况下,拥有较高的召 回率。 3 结束语 本文提出了一种 VideoSAR 动目标阴影检测 方法,该方法使用一个时间维度的滑动窗口结合 多帧信息来检测 VideoSAR 序列中的动目标阴 影。本文率先将深度学习应用到 VideoSAR 图像 去噪,表明使用可见光灰度图像训练的去噪模型 能够成功迁移到 VideoSAR 图像去噪任务当中, 第 17 卷 智 能 系 统 学 报 ·66·