正在加载图片...
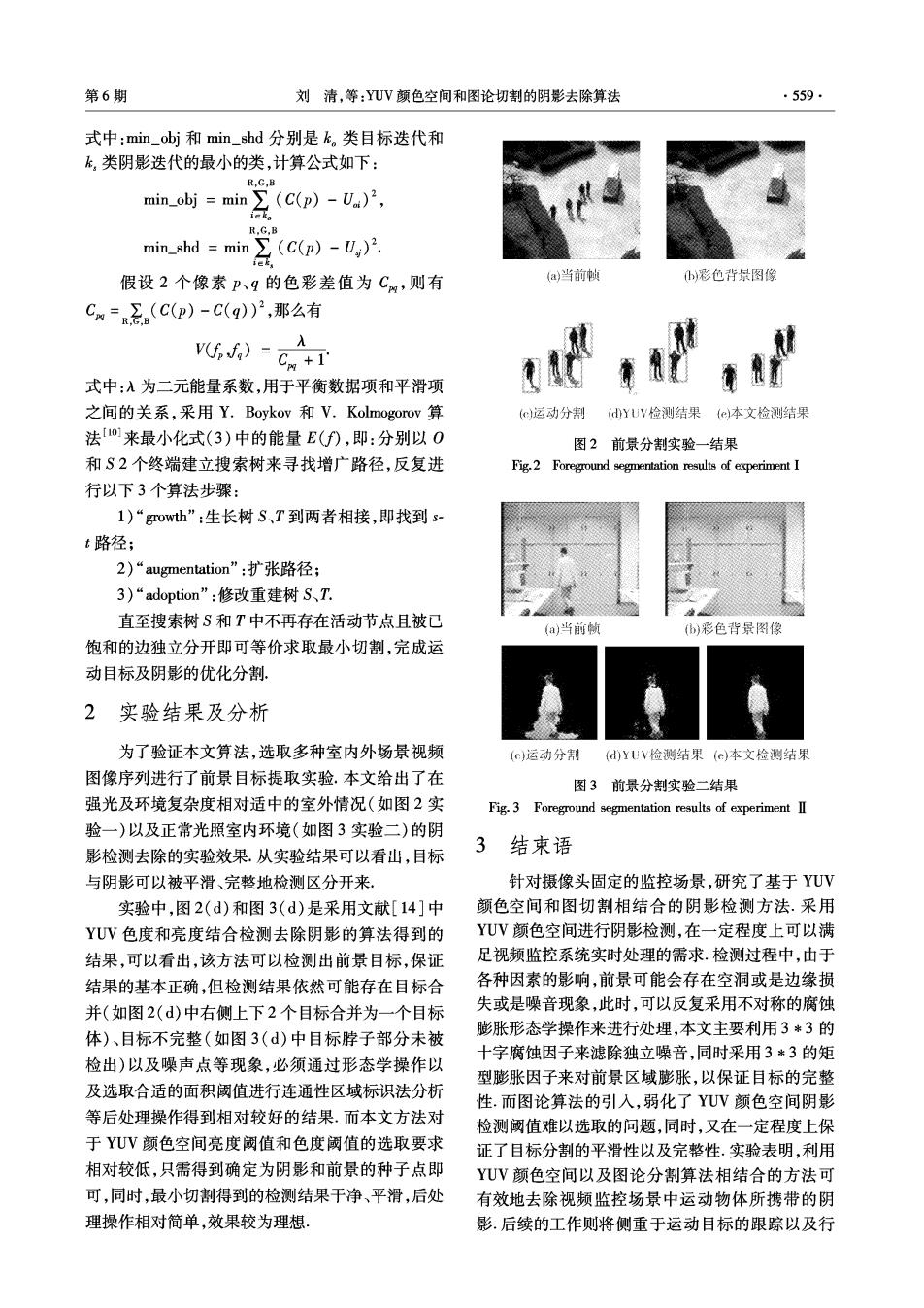
第6期 刘清,等:UV颜色空间和图论切割的阴影去除算法 ·559. 式中:min_obj和min_shd分别是k。类目标迭代和 飞,类阴影迭代的最小的类,计算公式如下: R.G.B min=m名(cp)-u,)月, R.G.B min_shd=min∑(c(p)-Vg). 假设2个像素p、q的色彩差值为Cg,则有 (a)当前帧 )彩色背景图像 Cm=&。(C(p)-C(q),那么有 vff )=Cm+1 入 式中:入为二元能量系数,用于平衡数据项和平滑项 之间的关系,采用Y.Boykov和V.Kolmogorov算 (c运动分割 dYUV检测结果(e)本文检测结果 法来最小化式(3)中的能量E(),即:分别以0 图2前景分割实验一结果 和S2个终端建立搜索树来寻找增广路径,反复进 Fig.2 Foreground segmentation results of experiment I 行以下3个算法步骤: 1)“growth'”:生长树S、T到两者相接,即找到s t路径; 2)“augmentation”:扩张路径; 3)“adoption”:修改重建树S、T. 直至搜索树S和T中不再存在活动节点且被已 (a)当前帧 ()彩色背景图像 饱和的边独立分开即可等价求取最小切割,完成运 动目标及阴影的优化分割. 2实验结果及分析 为了验证本文算法,选取多种室内外场景视频 ()运动分别 (d)YUV检测结果(e)本文检测结果 图像序列进行了前景目标提取实验.本文给出了在 图3前景分割实验二结果 强光及环境复杂度相对适中的室外情况(如图2实 Fig.3 Foreground segmentation results of experiment II 验一)以及正常光照室内环境(如图3实验二)的阴 影检测去除的实验效果,从实验结果可以看出,目标 3结束语 与阴影可以被平滑、完整地检测区分开来, 针对摄像头固定的监控场景,研究了基于YUV 实验中,图2(d)和图3(d)是采用文献[14]中 颜色空间和图切割相结合的阴影检测方法.采用 YUV色度和亮度结合检测去除阴影的算法得到的 YUV颜色空间进行阴影检测,在一定程度上可以满 结果,可以看出,该方法可以检测出前景目标,保证 足视频监控系统实时处理的需求.检测过程中,由于 结果的基本正确,但检测结果依然可能存在目标合 各种因素的影响,前景可能会存在空洞或是边缘损 并(如图2(d)中右侧上下2个目标合并为一个目标 失或是噪音现象,此时,可以反复采用不对称的腐蚀 体)、目标不完整(如图3(d)中目标脖子部分未被 膨胀形态学操作来进行处理,本文主要利用3*3的 十字腐蚀因子来滤除独立噪音,同时采用3*3的矩 检出)以及噪声点等现象,必须通过形态学操作以 型膨胀因子来对前景区域膨胀,以保证目标的完整 及选取合适的面积阈值进行连通性区域标识法分析 性.而图论算法的引入,弱化了YUV颜色空间阴影 等后处理操作得到相对较好的结果.而本文方法对 检测阈值难以选取的问题,同时,又在一定程度上保 于YUV颜色空间亮度阈值和色度阈值的选取要求 证了目标分割的平滑性以及完整性.实验表明,利用 相对较低,只需得到确定为阴影和前景的种子点即 YUV颜色空间以及图论分割算法相结合的方法可 可,同时,最小切割得到的检测结果干净、平滑,后处 有效地去除视频监控场景中运动物体所携带的阴 理操作相对简单,效果较为理想, 影.后续的工作则将侧重于运动目标的跟踪以及行