正在加载图片...
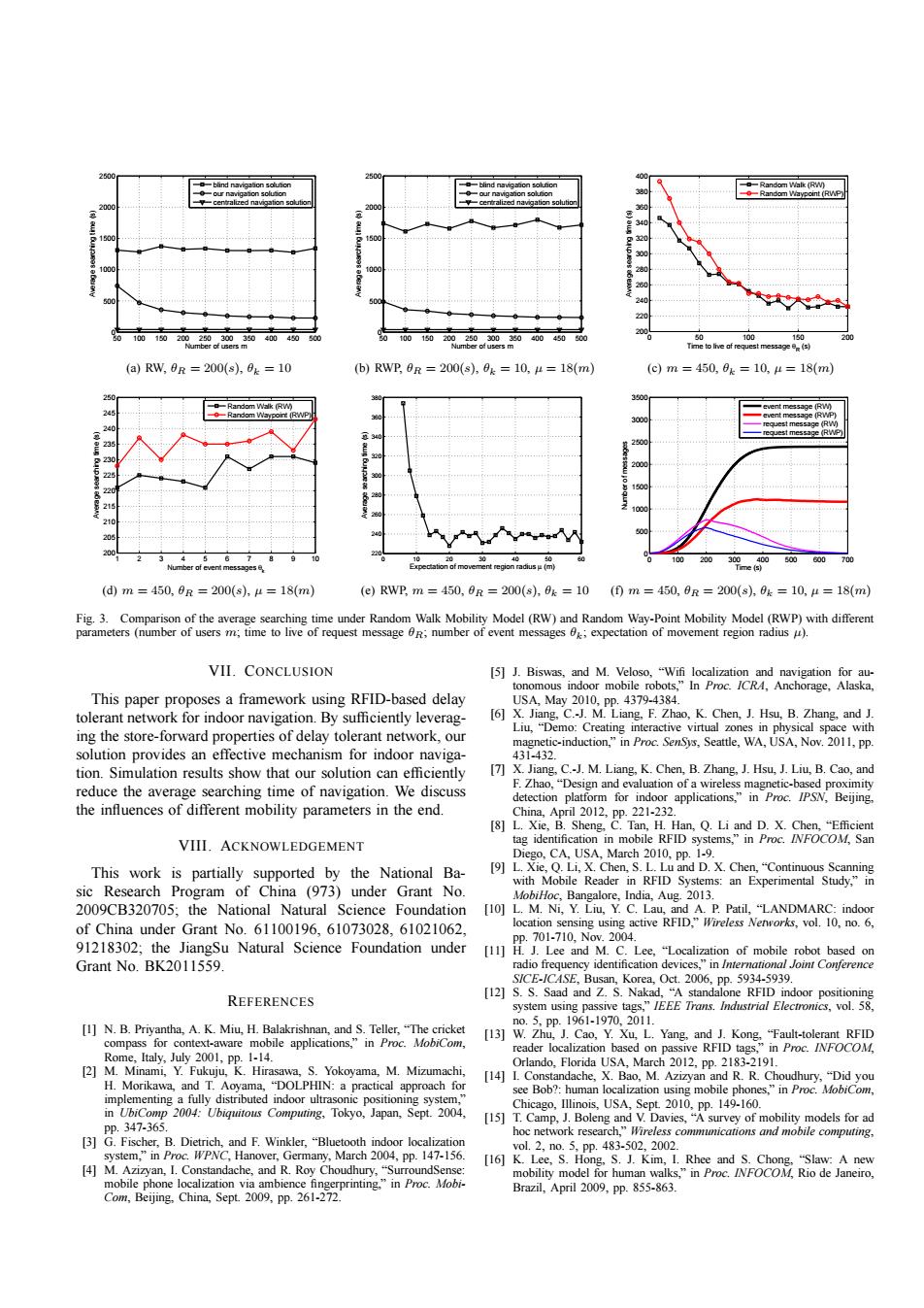
250 centralized navigation solutior 100 t00 150202030030400450 (a)RW,8r=200(s),0=10 (b)RWP0r=200(s),0k=10,4=18(m} (c)m=450,0=10,4=18(m) 250 3500 245 3000 240 23 2500 2000 22 50 21 210 20 200 3 40 Expectation of movement region radius(m) 200 600 0 Number of event messagese (dm=450,0r=200(s),4=18(m) (e)RWP,m=450,0R=200(s),0k=10 ()m=450,0r=200(s),0k=10,μ=18(m) Fig.3.Comparison of the average searching time under Random Walk Mobility Model(RW)and Random Way-Point Mobility Model(RWP)with different parameters (number of users m;time to live of request message R;number of event messages expectation of movement region radius u). VII.CONCLUSION [5]J.Biswas,and M.Veloso,"Wifi localization and navigation for au- tonomous indoor mobile robots,"In Proc.ICRA,Anchorage,Alaska, This paper proposes a framework using RFID-based delay 0 SA,May2010,pp.4379-4384. tolerant network for indoor navigation.By sufficiently leverag- [6]X.Jiang,C.-J.M.Liang,F.Zhao,K.Chen,J.Hsu,B.Zhang,and J. ing the store-forward properties of delay tolerant network,our Liu,Demo:Creating interactive virtual zones in physical space with magnetic-induction,"in Proc.SenSys,Seattle,WA,USA,Nov.2011,pp solution provides an effective mechanism for indoor naviga 431-432. tion.Simulation results show that our solution can efficiently [7]X.Jiang,C.-J.M.Liang,K.Chen,B.Zhang,J.Hsu,J.Liu,B.Cao,and reduce the average searching time of navigation.We discuss F.Zhao,"Design and evaluation of a wireless magnetic-based proximity detection platform for indoor applications,"in Proc.IPSN,Beijing the influences of different mobility parameters in the end. China,April 2012,pp.221-232. [8]L.Xie,B.Sheng,C.Tan,H.Han,Q.Li and D.X.Chen,"Efficient VIII.ACKNOWLEDGEMENT tag identification in mobile RFID systems,"in Proc.INFOCOM,San Diego,CA.USA,March 2010,pp.1-9. This work is partially supported by the National Ba- [9]L.Xie,Q.Li,X.Chen,S.L.Lu and D.X.Chen,"Continuous Scanning sic Research Program of China (973)under Grant No. with Mobile Reader in RFID Systems:an Experimental Study,"in MobiHoc,Bangalore,India,Aug.2013. 2009CB320705:the National Natural Science Foundation [10]L.M.Ni,Y.Liu,Y.C.Lau,and A.P.Patil,"LANDMARC:indoor of China under Grant No.61100196,61073028.61021062. location sensing using active RFID,"Wireless Nerworks,vol.10,no.6, Pp.701-710,Now.2004. 91218302:the JiangSu Natural Science Foundation under [11] H.J.Lee and M.C.Lee,"Localization of mobile robot based on Grant No.BK2011559 radio frequency identification devices,"in International Joint Conference S/CE-/CASE,Busan,Korea,Oct.2006,pp.5934-5939. REFERENCES [12]S.S.Saad and Z.S.Nakad,"A standalone RFID indoor positioning system using passive tags,"IEEE Trans.Industrial Electronics,vol.58. [1]N.B.Priyantha,A.K.Miu,H.Balakrishnan,and S.Teller,"The cricket n0.5Pp.1961-1970,2011. [13]W.Zhu,J.Cao,Y.Xu,L.Yang,and J.Kong."Fault-tolerant RFID compass for context-aware mobile applications,"in Proc.MobiCom, reader localization based on passive RFID tags,"in Proc.INFOCOM, Rome,Italy,July 2001,pp.1-14. [2]M.Minami,Y.Fukuju,K.Hirasawa,S.Yokoyama,M.Mizumachi, Orlando,Florida USA,March 2012,pp.2183-2191 [14]I.Constandache,X.Bao,M.Azizyan and R.R.Choudhury,"Did you H.Morikawa,and T.Aoyama,"DOLPHIN:a practical approach for see Bob?:human localization using mobile phones,"in Proc.MobiCom, implementing a fully distributed indoor ultrasonic positioning system, in UbiComp 2004:Ubiguitous Computing,Tokyo,Japan,Sept.2004. Chicago,Illinois,USA,Sept 2010,pp.149-160. [15]T.Camp,J.Boleng and V.Davies,"A survey of mobility models for ad pp.347-365. hoc network research."Wireless commications and mobile computing. [3]G.Fischer,B.Dietrich,and F.Winkler,"Bluetooth indoor localizatior system,"in Proc.WPNC,Hanover,Germany,March 2004,pp.147-156 vol.2,no.5,Pp.483-502,2002. [16]K.Lee,S.Hong,S.J.Kim,I.Rhee and S.Chong,"Slaw:A new [4]M.Azizyan,I.Constandache,and R.Roy Choudhury,"SurroundSense: mobility model for human walks,"in Proc.INFOCOM,Rio de Janeiro, mobile phone localization via ambience fingerprinting,"in Proc.Mobi- Com,Beijing,China,Sept.2009,pp.261-272 Brazil,April 2009,pp.855-863.50 100 150 200 250 300 350 400 450 500 0 500 1000 1500 2000 2500 Number of users m Average searching time (s) blind navigation solution our navigation solution centralized navigation solution (a) RW, θR = 200(s), θk = 10 50 100 150 200 250 300 350 400 450 500 0 500 1000 1500 2000 2500 Number of users m Average searching time (s) blind navigation solution our navigation solution centralized navigation solution (b) RWP, θR = 200(s), θk = 10, µ = 18(m) 0 50 100 150 200 200 220 240 260 280 300 320 340 360 380 400 Time to live of request message θ R (s) Average searching time (s) Random Walk (RW) Random Waypoint (RWP) (c) m = 450, θk = 10, µ = 18(m) 1 2 3 4 5 6 7 8 9 10 200 205 210 215 220 225 230 235 240 245 250 Number of event messages θ k Average searching time (s) Random Walk (RW) Random Waypoint (RWP) (d) m = 450, θR = 200(s), µ = 18(m) 0 10 20 30 40 50 60 220 240 260 280 300 320 340 360 380 Expectation of movement region radius µ (m) Average searching time (s) (e) RWP, m = 450, θR = 200(s), θk = 10 0 100 200 300 400 500 600 700 0 500 1000 1500 2000 2500 3000 3500 Time (s) Number of messages event message (RW) event message (RWP) request message (RW) request message (RWP) (f) m = 450, θR = 200(s), θk = 10, µ = 18(m) Fig. 3. Comparison of the average searching time under Random Walk Mobility Model (RW) and Random Way-Point Mobility Model (RWP) with different parameters (number of users m; time to live of request message θR; number of event messages θk; expectation of movement region radius µ). VII. CONCLUSION This paper proposes a framework using RFID-based delay tolerant network for indoor navigation. By sufficiently leveraging the store-forward properties of delay tolerant network, our solution provides an effective mechanism for indoor navigation. Simulation results show that our solution can efficiently reduce the average searching time of navigation. We discuss the influences of different mobility parameters in the end. VIII. ACKNOWLEDGEMENT This work is partially supported by the National Basic Research Program of China (973) under Grant No. 2009CB320705; the National Natural Science Foundation of China under Grant No. 61100196, 61073028, 61021062, 91218302; the JiangSu Natural Science Foundation under Grant No. BK2011559. REFERENCES [1] N. B. Priyantha, A. K. Miu, H. Balakrishnan, and S. Teller, “The cricket compass for context-aware mobile applications,” in Proc. MobiCom, Rome, Italy, July 2001, pp. 1-14. [2] M. Minami, Y. Fukuju, K. Hirasawa, S. Yokoyama, M. Mizumachi, H. Morikawa, and T. Aoyama, “DOLPHIN: a practical approach for implementing a fully distributed indoor ultrasonic positioning system,” in UbiComp 2004: Ubiquitous Computing, Tokyo, Japan, Sept. 2004, pp. 347-365. [3] G. Fischer, B. Dietrich, and F. Winkler, “Bluetooth indoor localization system,” in Proc. WPNC, Hanover, Germany, March 2004, pp. 147-156. [4] M. Azizyan, I. Constandache, and R. Roy Choudhury, “SurroundSense: mobile phone localization via ambience fingerprinting,” in Proc. MobiCom, Beijing, China, Sept. 2009, pp. 261-272. [5] J. Biswas, and M. Veloso, “Wifi localization and navigation for autonomous indoor mobile robots,” In Proc. ICRA, Anchorage, Alaska, USA, May 2010, pp. 4379-4384. [6] X. Jiang, C.-J. M. Liang, F. Zhao, K. Chen, J. Hsu, B. Zhang, and J. Liu, “Demo: Creating interactive virtual zones in physical space with magnetic-induction,” in Proc. SenSys, Seattle, WA, USA, Nov. 2011, pp. 431-432. [7] X. Jiang, C.-J. M. Liang, K. Chen, B. Zhang, J. Hsu, J. Liu, B. Cao, and F. Zhao, “Design and evaluation of a wireless magnetic-based proximity detection platform for indoor applications,” in Proc. IPSN, Beijing, China, April 2012, pp. 221-232. [8] L. Xie, B. Sheng, C. Tan, H. Han, Q. Li and D. X. Chen, “Efficient tag identification in mobile RFID systems,” in Proc. INFOCOM, San Diego, CA, USA, March 2010, pp. 1-9. [9] L. Xie, Q. Li, X. Chen, S. L. Lu and D. X. Chen, “Continuous Scanning with Mobile Reader in RFID Systems: an Experimental Study,” in MobiHoc, Bangalore, India, Aug. 2013. [10] L. M. Ni, Y. Liu, Y. C. Lau, and A. P. Patil, “LANDMARC: indoor location sensing using active RFID,” Wireless Networks, vol. 10, no. 6, pp. 701-710, Nov. 2004. [11] H. J. Lee and M. C. Lee, “Localization of mobile robot based on radio frequency identification devices,” in International Joint Conference SICE-ICASE, Busan, Korea, Oct. 2006, pp. 5934-5939. [12] S. S. Saad and Z. S. Nakad, “A standalone RFID indoor positioning system using passive tags,” IEEE Trans. Industrial Electronics, vol. 58, no. 5, pp. 1961-1970, 2011. [13] W. Zhu, J. Cao, Y. Xu, L. Yang, and J. Kong, “Fault-tolerant RFID reader localization based on passive RFID tags,” in Proc. INFOCOM, Orlando, Florida USA, March 2012, pp. 2183-2191. [14] I. Constandache, X. Bao, M. Azizyan and R. R. Choudhury, “Did you see Bob?: human localization using mobile phones,” in Proc. MobiCom, Chicago, Illinois, USA, Sept. 2010, pp. 149-160. [15] T. Camp, J. Boleng and V. Davies, “A survey of mobility models for ad hoc network research,” Wireless communications and mobile computing, vol. 2, no. 5, pp. 483-502, 2002. [16] K. Lee, S. Hong, S. J. Kim, I. Rhee and S. Chong, “Slaw: A new mobility model for human walks,” in Proc. INFOCOM, Rio de Janeiro, Brazil, April 2009, pp. 855-863