正在加载图片...
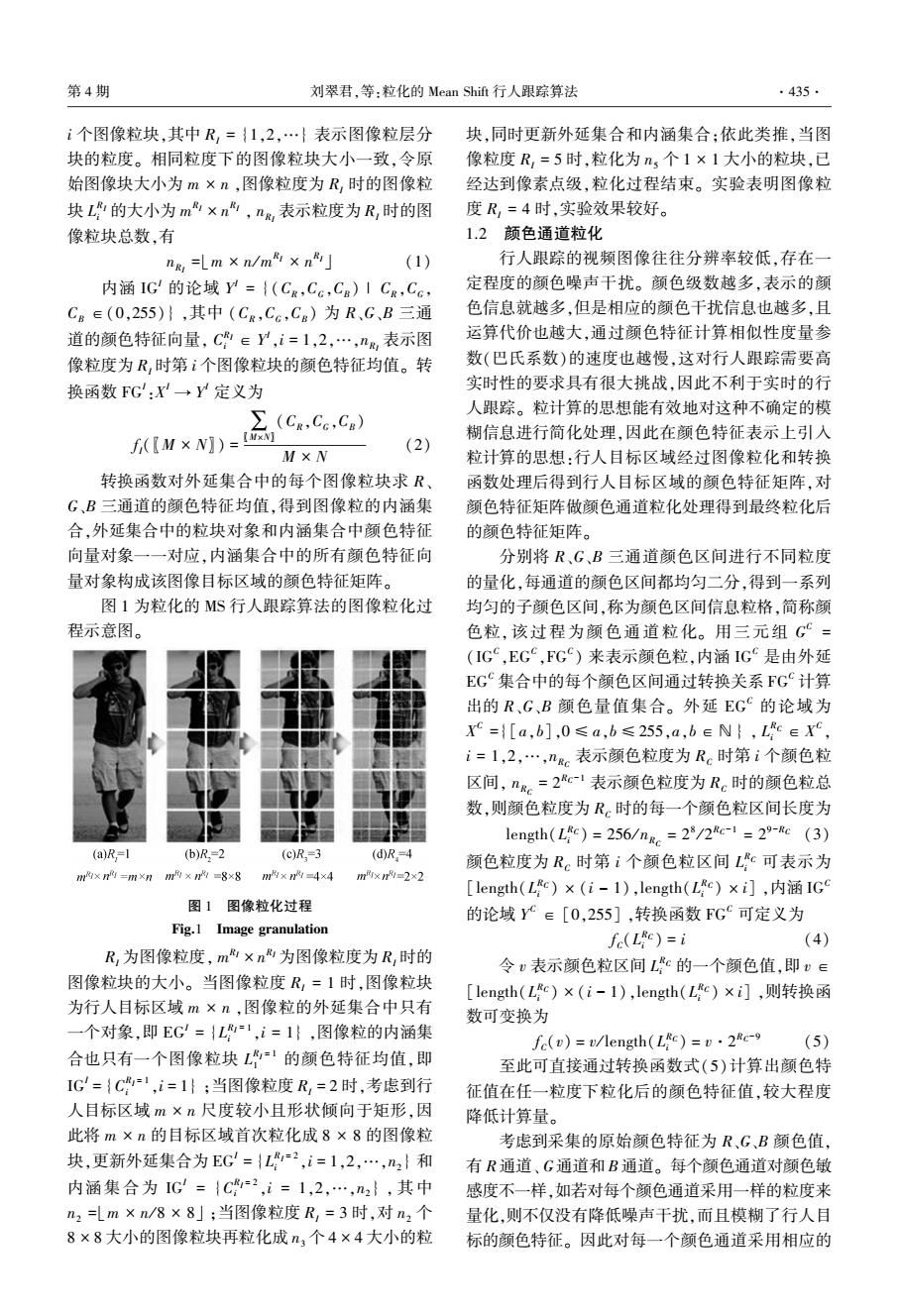
第4期 刘翠君,等:粒化的Mean Shift行人跟踪算法 ·435. i个图像粒块,其中R,={1,2,…}表示图像粒层分 块,同时更新外延集合和内涵集合:依此类推,当图 块的粒度。相同粒度下的图像粒块大小一致,令原 像粒度R,=5时,粒化为n个1×1大小的粒块,已 始图像块大小为m×n,图像粒度为R,时的图像粒 经达到像素点级,粒化过程结束。实验表明图像粒 块L的大小为m×n:,ne表示粒度为R,时的图 度R,=4时,实验效果较好。 像粒块总数,有 1.2颜色通道粒化 nR=Lm×n/m×n」j (1) 行人跟踪的视频图像往往分辨率较低,存在一 内涵IG的论域Y={(CR,Cc,Cg)|CR,Cc, 定程度的颜色噪声干扰。颜色级数越多,表示的颜 CB∈(0,255)},其中(CR,Cc,Cg)为R、G、B三通 色信息就越多,但是相应的颜色干扰信息也越多,且 道的颜色特征向量,C∈',i=1,2,…,nR,表示图 运算代价也越大,通过颜色特征计算相似性度量参 像粒度为R,时第i个图像粒块的颜色特征均值。转 数(巴氏系数)的速度也越慢,这对行人跟踪需要高 换函数FG:X'→Y定义为 实时性的要求具有很大挑战,因此不利于实时的行 ∑(CR,Cc,Cs) 人跟踪。粒计算的思想能有效地对这种不确定的模 fIM×NI)= 糊信息进行简化处理,因此在颜色特征表示上引入 (2) M×N 粒计算的思想:行人目标区域经过图像粒化和转换 转换函数对外延集合中的每个图像粒块求R、 函数处理后得到行人目标区域的颜色特征矩阵,对 G、B三通道的颜色特征均值,得到图像粒的内涵集 颜色特征矩阵做颜色通道粒化处理得到最终粒化后 合,外延集合中的粒块对象和内涵集合中颜色特征 的颜色特征矩阵。 向量对象一一对应,内涵集合中的所有颜色特征向 分别将R、G、B三通道颜色区间进行不同粒度 量对象构成该图像目标区域的颜色特征矩阵。 的量化,每通道的颜色区间都均匀二分,得到一系列 图1为粒化的MS行人跟踪算法的图像粒化过 均匀的子颜色区间,称为颜色区间信息粒格,简称颜 程示意图。 色粒,该过程为颜色通道粒化。用三元组G= (IGC,EGC,FGC)来表示颜色粒,内涵IGC是由外延 EG集合中的每个颜色区间通过转换关系FGC计算 出的R、G、B颜色量值集合。外延EG的论域为 Xc={[a,b],0≤a,b≤255,a,b∈N},Lc∈Xc, i=1,2,…,ngc表示颜色粒度为Rc时第i个颜色粒 区间,nR,=2c-1表示颜色粒度为Rc时的颜色粒总 数,则颜色粒度为R。时的每一个颜色粒区间长度为 length(Le)=256/ne=28/2c-1=29-c(3) (a)R,=I (b)R=2 (c)R=3 (d)R=4 颜色粒度为Rc时第i个颜色粒区间Lc可表示为 m×n=7m×nm×=8×8m×n=4×4m×81=2×2 [length(Lc)×(i-1),length(Lc)×i],内涵IGc 图1图像粒化过程 的论域∈[0,255],转换函数FGc可定义为 Fig.1 Image granulation fc(Lc)=i (4) R,为图像粒度,m×n为图像粒度为R,时的 令v表示颜色粒区间Lc的一个颜色值,即v∈ 图像粒块的大小。当图像粒度R,=1时,图像粒块 [length(Lc)×(i-1),length(Lc)×i],则转换函 为行人目标区域m×n,图像粒的外延集合中只有 数可变换为 一个对象,即EG={L=1,i=1},图像粒的内涵集 fc(v)=v/length(Lc)=v.2Rc-9 (5) 合也只有一个图像粒块L1的颜色特征均值,即 至此可直接通过转换函数式(5)计算出颜色特 IG={C=1,i=1};当图像粒度R=2时,考虑到行 征值在任一粒度下粒化后的颜色特征值,较大程度 人目标区域m×n尺度较小且形状倾向于矩形,因 降低计算量。 此将m×n的目标区域首次粒化成8×8的图像粒 考虑到采集的原始颜色特征为R、G、B颜色值, 块,更新外延集合为EG={L=2,i=1,2,…,n2}和 有R通道、G通道和B通道。每个颜色通道对颜色敏 内涵集合为IG={C2,i=1,2,…,n2},其中 感度不一样,如若对每个颜色通道采用一样的粒度来 n2=lm×n/8×8」;当图像粒度R,=3时,对n2个 量化,则不仅没有降低噪声干扰,而且模糊了行人目 8×8大小的图像粒块再粒化成n,个4×4大小的粒 标的颜色特征。因此对每一个颜色通道采用相应的i 个图像粒块,其中 RI = {1,2,…} 表示图像粒层分 块的粒度。 相同粒度下的图像粒块大小一致,令原 始图像块大小为 m × n ,图像粒度为 RI 时的图像粒 块 L RI i 的大小为 m RI × n RI , nRI 表示粒度为 RI 时的图 像粒块总数,有 nRI =⌊m × n / m RI × n RI」 (1) 内涵 IG I 的论域 Y I = {(CR ,CG ,CB ) | CR ,CG , CB ∈(0,255)} ,其中 (CR ,CG ,CB ) 为 R、G、B 三通 道的颜色特征向量, C RI i ∈ Y I ,i = 1,2,…,nRI 表示图 像粒度为 RI 时第 i 个图像粒块的颜色特征均值。 转 换函数 FG I :X I → Y I 定义为 f I(〖M × N〗) = 〖 ∑M×N〗 (CR ,CG ,CB ) M × N (2) 转换函数对外延集合中的每个图像粒块求 R、 G、B 三通道的颜色特征均值,得到图像粒的内涵集 合,外延集合中的粒块对象和内涵集合中颜色特征 向量对象一一对应,内涵集合中的所有颜色特征向 量对象构成该图像目标区域的颜色特征矩阵。 图 1 为粒化的 MS 行人跟踪算法的图像粒化过 程示意图。 图 1 图像粒化过程 Fig.1 Image granulation RI 为图像粒度, m RI × n RI 为图像粒度为 RI 时的 图像粒块的大小。 当图像粒度 RI = 1 时,图像粒块 为行人目标区域 m × n ,图像粒的外延集合中只有 一个对象,即 EG I = {L RI = 1 i ,i = 1} ,图像粒的内涵集 合也只有一个图像粒块 L RI = 1 1 的颜色特征均值,即 IG I = {C RI = 1 i ,i = 1} ;当图像粒度 RI = 2 时,考虑到行 人目标区域 m × n 尺度较小且形状倾向于矩形,因 此将 m × n 的目标区域首次粒化成 8 × 8 的图像粒 块,更新外延集合为 EG I = {L RI = 2 i ,i = 1,2,…,n2 } 和 内涵集合为 IG I = {C RI = 2 i ,i = 1,2,…,n2 } , 其 中 n2 =⌊m × n / 8 × 8」 ;当图像粒度 RI = 3 时,对 n2 个 8 × 8 大小的图像粒块再粒化成 n3 个 4 × 4 大小的粒 块,同时更新外延集合和内涵集合;依此类推,当图 像粒度 RI = 5 时,粒化为 n5 个 1 × 1 大小的粒块,已 经达到像素点级,粒化过程结束。 实验表明图像粒 度 RI = 4 时,实验效果较好。 1.2 颜色通道粒化 行人跟踪的视频图像往往分辨率较低,存在一 定程度的颜色噪声干扰。 颜色级数越多,表示的颜 色信息就越多,但是相应的颜色干扰信息也越多,且 运算代价也越大,通过颜色特征计算相似性度量参 数(巴氏系数)的速度也越慢,这对行人跟踪需要高 实时性的要求具有很大挑战,因此不利于实时的行 人跟踪。 粒计算的思想能有效地对这种不确定的模 糊信息进行简化处理,因此在颜色特征表示上引入 粒计算的思想:行人目标区域经过图像粒化和转换 函数处理后得到行人目标区域的颜色特征矩阵,对 颜色特征矩阵做颜色通道粒化处理得到最终粒化后 的颜色特征矩阵。 分别将 R、G、B 三通道颜色区间进行不同粒度 的量化,每通道的颜色区间都均匀二分,得到一系列 均匀的子颜色区间,称为颜色区间信息粒格,简称颜 色粒, 该过程为颜色通道粒化。 用三元组 G C = (IG C ,EG C ,FG C ) 来表示颜色粒,内涵 IG C 是由外延 EG C 集合中的每个颜色区间通过转换关系 FG C 计算 出的 R、G、B 颜色量值集合。 外延 EG C 的论域为 X C ={[a,b],0 ≤ a,b ≤255,a,b ∈ ℕ } , L RC i ∈ X C , i = 1,2,…,nRC 表示颜色粒度为 RC 时第 i 个颜色粒 区间, nRC = 2 RC -1 表示颜色粒度为 RC 时的颜色粒总 数,则颜色粒度为 RC 时的每一个颜色粒区间长度为 length(L RC i ) = 256 / nRC = 2 8 / 2 RC -1 = 2 9-RC (3) 颜色粒度为 RC 时第 i 个颜色粒区间 L RC i 可表示为 [length(L RC i ) × (i - 1),length(L RC i ) × i] ,内涵 IG C 的论域 Y C ∈ [0,255] ,转换函数 FG C 可定义为 fC(L RC i ) = i (4) 令 v 表示颜色粒区间 L RC i 的一个颜色值,即 v ∈ [length(L RC i ) × (i - 1),length(L RC i ) × i] ,则转换函 数可变换为 fC(v) = v/ length(L RC i ) = v·2 RC -9 (5) 至此可直接通过转换函数式(5)计算出颜色特 征值在任一粒度下粒化后的颜色特征值,较大程度 降低计算量。 考虑到采集的原始颜色特征为 R、G、B 颜色值, 有 R 通道、 G 通道和 B 通道。 每个颜色通道对颜色敏 感度不一样,如若对每个颜色通道采用一样的粒度来 量化,则不仅没有降低噪声干扰,而且模糊了行人目 标的颜色特征。 因此对每一个颜色通道采用相应的 第 4 期 刘翠君,等:粒化的 Mean Shift 行人跟踪算法 ·435·