正在加载图片...
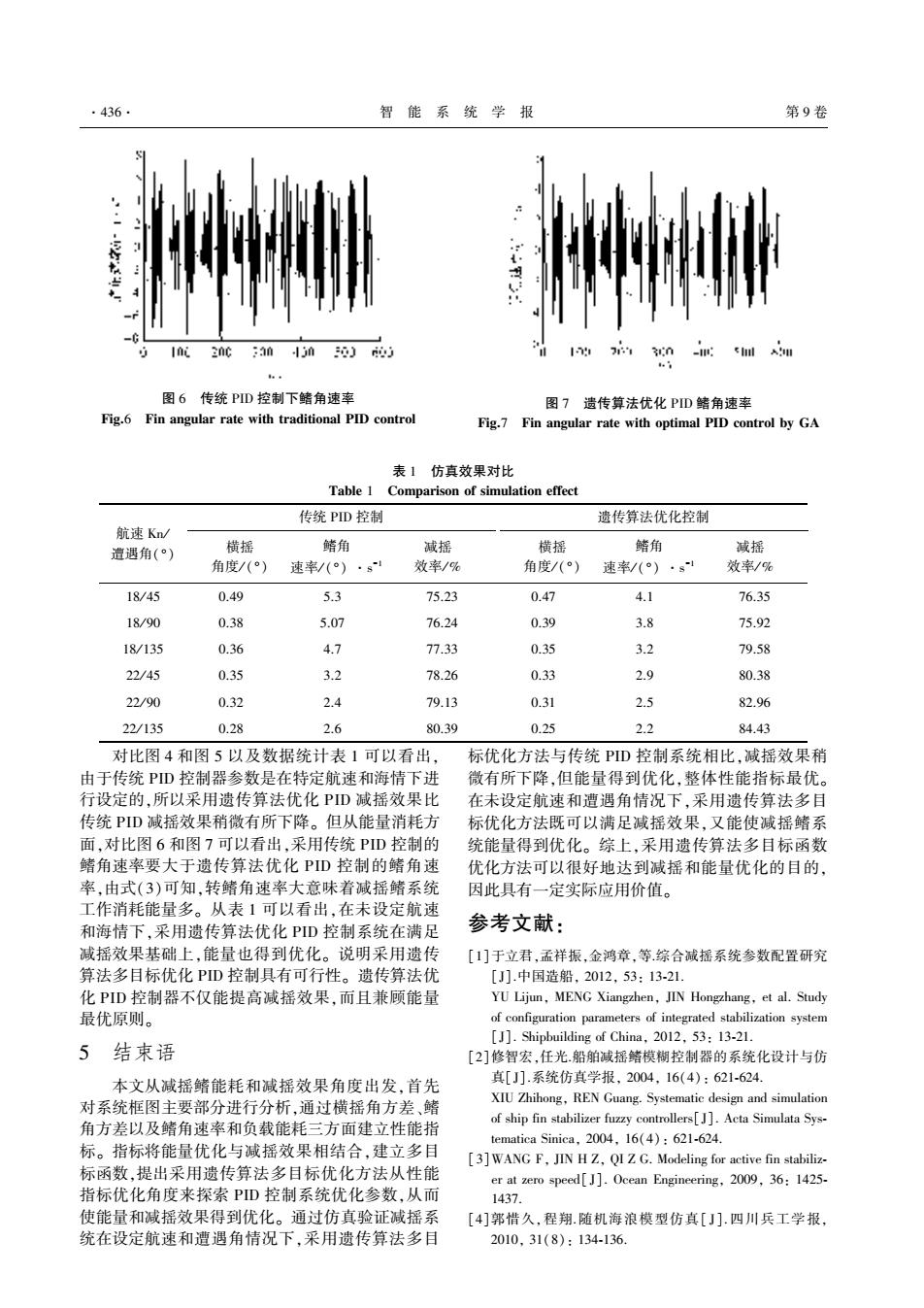
·436 智能系统学报 第9卷 1 0-I e. 图6传统PD控制下鳍角速率 图7遗传算法优化PD鳍角速率 Fig.6 Fin angular rate with traditional PID control Fig.7 Fin angular rate with optimal PID control by GA 表1仿真效果对比 Table 1 Comparison of simulation effect 传统PD控制 遗传算法优化控制 航速Kn 遭遇角() 横摇 鳍角 减摇 横摇 鳍角 减摇 角度/(°) 速率/()·s 效率/% 角度/(o) 速率/(°)·s 效率/% 18/45 0.49 5.3 75.23 0.47 4.1 76.35 18/90 0.38 5.07 76.24 0.39 3.8 75.92 18/135 0.36 4.7 77.33 0.35 3.2 79.58 22/45 0.35 3.2 78.26 0.33 2.9 80.38 22/90 0.32 2.4 79.13 0.31 2.5 82.96 22/135 0.28 2.6 80.39 0.25 2.2 84.43 对比图4和图5以及数据统计表1可以看出, 标优化方法与传统PID控制系统相比,减摇效果稍 由于传统PD控制器参数是在特定航速和海情下进 微有所下降,但能量得到优化,整体性能指标最优。 行设定的,所以采用遗传算法优化PD减摇效果比 在未设定航速和遭遇角情况下,采用遗传算法多目 传统PD减摇效果稍微有所下降。但从能量消耗方 标优化方法既可以满足减摇效果,又能使减摇鳍系 面,对比图6和图7可以看出,采用传统PD控制的 统能量得到优化。综上,采用遗传算法多目标函数 鳍角速率要大于遗传算法优化PD控制的鳍角速 优化方法可以很好地达到减摇和能量优化的目的, 率,由式(3)可知,转鳍角速率大意味着减摇鳍系统 因此具有一定实际应用价值。 工作消耗能量多。从表1可以看出,在未设定航速 和海情下,采用遗传算法优化PD控制系统在满足 参考文献: 减摇效果基础上,能量也得到优化。说明采用遗传 [1]于立君,孟祥振,金鸿章,等综合减摇系统参数配置研究 算法多目标优化PD控制具有可行性。遗传算法优 [J].中国造船,2012,53:13-21. 化PID控制器不仅能提高减摇效果,而且兼顾能量 YU Lijun,MENG Xiangzhen,JIN Hongzhang,et al.Study 最优原则。 of configuration parameters of integrated stabilization system [J].Shipbuilding of China,2012,53:13-21. 5 结束语 [2]修智宏,任光.船舶减摇鳍模糊控制器的系统化设计与仿 本文从减摇鳍能耗和减摇效果角度出发,首先 真[J].系统仿真学报,2004,16(4):621-624 对系统框图主要部分进行分析,通过横摇角方差、鳍 XIU Zhihong,REN Guang.Systematic design and simulation of ship fin stabilizer fuzzy controllers[].Acta Simulata Sys- 角方差以及鳍角速率和负载能耗三方面建立性能指 tematica Sinica,2004,16(4):621-624. 标。指标将能量优化与减摇效果相结合,建立多目 [3]WANG F,JIN H Z,QI Z G.Modeling for active fin stabiliz- 标函数,提出采用遗传算法多目标优化方法从性能 er at zero speed[]].Ocean Engineering,2009,36:1425- 指标优化角度来探索PD控制系统优化参数,从而 1437. 使能量和减摇效果得到优化。通过仿真验证减摇系 [4]郭惜久,程翔.随机海浪模型仿真[J].四川兵工学报, 统在设定航速和遭遇角情况下,采用遗传算法多目 2010,31(8):134-136.图 远摇 传统 孕陨阅 控制下鳍角速率 云蚤早援远摇 云蚤灶 葬灶早怎造葬则 则葬贼藻 憎蚤贼澡 贼则葬凿蚤贼蚤燥灶葬造 孕陨阅 糟燥灶贼则燥造 图 苑摇 遗传算法优化 孕陨阅 鳍角速率 云蚤早援苑摇 云蚤灶 葬灶早怎造葬则 则葬贼藻 憎蚤贼澡 燥责贼蚤皂葬造 孕陨阅 糟燥灶贼则燥造 遭赠 郧粤 表 员摇 仿真效果对比 栽葬遭造藻 员摇 悦燥皂责葬则蚤泽燥灶 燥枣 泽蚤皂怎造葬贼蚤燥灶 藻枣枣藻糟贼 航速 运灶 辕 遭遇角渊毅冤 传统 孕陨阅 控制 横摇 角度辕 渊毅冤 鳍角 速率辕 渊毅冤 窑泽原员 减摇 效率辕 豫 遗传算法优化控制 横摇 角度辕 渊毅冤 鳍角 速率辕 渊毅冤 窑泽原员 减摇 效率辕 豫 员愿 辕 源缘 园援源怨 缘援猿 苑缘援圆猿 园援源苑 源援员 苑远援猿缘 员愿 辕 怨园 园援猿愿 缘援园苑 苑远援圆源 园援猿怨 猿援愿 苑缘援怨圆 员愿 辕 员猿缘 园援猿远 源援苑 苑苑援猿猿 园援猿缘 猿援圆 苑怨援缘愿 圆圆 辕 源缘 园援猿缘 猿援圆 苑愿援圆远 园援猿猿 圆援怨 愿园援猿愿 圆圆 辕 怨园 园援猿圆 圆援源 苑怨援员猿 园援猿员 圆援缘 愿圆援怨远 圆圆 辕 员猿缘 园援圆愿 圆援远 愿园援猿怨 园援圆缘 圆援圆 愿源援源猿 摇 摇 对比图 源 和图 缘 以及数据统计表 员 可以看出袁 由于传统 孕陨阅 控制器参数是在特定航速和海情下进 行设定的袁所以采用遗传算法优化 孕陨阅 减摇效果比 传统 孕陨阅 减摇效果稍微有所下降遥 但从能量消耗方 面袁对比图 远 和图 苑 可以看出袁采用传统 孕陨阅 控制的 鳍角速率要大于遗传算法优化 孕陨阅 控制的鳍角速 率袁由式渊猿冤可知袁转鳍角速率大意味着减摇鳍系统 工作消耗能量多遥 从表 员 可以看出袁在未设定航速 和海情下袁采用遗传算法优化 孕陨阅 控制系统在满足 减摇效果基础上袁能量也得到优化遥 说明采用遗传 算法多目标优化 孕陨阅 控制具有可行性遥 遗传算法优 化 孕陨阅 控制器不仅能提高减摇效果袁而且兼顾能量 最优原则遥 缘摇 结束语 本文从减摇鳍能耗和减摇效果角度出发袁首先 对系统框图主要部分进行分析袁通过横摇角方差尧鳍 角方差以及鳍角速率和负载能耗三方面建立性能指 标遥 指标将能量优化与减摇效果相结合袁建立多目 标函数袁提出采用遗传算法多目标优化方法从性能 指标优化角度来探索 孕陨阅 控制系统优化参数袁从而 使能量和减摇效果得到优化遥 通过仿真验证减摇系 统在设定航速和遭遇角情况下袁采用遗传算法多目 标优化方法与传统 孕陨阅 控制系统相比袁减摇效果稍 微有所下降袁但能量得到优化袁整体性能指标最优遥 在未设定航速和遭遇角情况下袁采用遗传算法多目 标优化方法既可以满足减摇效果袁又能使减摇鳍系 统能量得到优化遥 综上袁采用遗传算法多目标函数 优化方法可以很好地达到减摇和能量优化的目的袁 因此具有一定实际应用价值遥 参考文献院 咱员暂于立君袁孟祥振袁金鸿章袁等援综合减摇系统参数配置研究 咱允暂援中国造船袁 圆园员圆袁 缘猿院 员猿鄄圆员援 再哉 蕴蚤躁怎灶袁 酝耘晕郧 载蚤葬灶早扎澡藻灶袁 允陨晕 匀燥灶早扎澡葬灶早袁 藻贼 葬造援 杂贼怎凿赠 燥枣 糟燥灶枣蚤早怎则葬贼蚤燥灶 责葬则葬皂藻贼藻则泽 燥枣 蚤灶贼藻早则葬贼藻凿 泽贼葬遭蚤造蚤扎葬贼蚤燥灶 泽赠泽贼藻皂 咱 允暂援 杂澡蚤责遭怎蚤造凿蚤灶早 燥枣 悦澡蚤灶葬袁 圆园员圆袁 缘猿院 员猿鄄圆员援 咱圆暂修智宏袁任光援船舶减摇鳍模糊控制器的系统化设计与仿 真咱允暂援系统仿真学报袁 圆园园源袁 员远渊源冤院 远圆员鄄远圆源援 载陨哉 在澡蚤澡燥灶早袁 砸耘晕 郧怎葬灶早援 杂赠泽贼藻皂葬贼蚤糟 凿藻泽蚤早灶 葬灶凿 泽蚤皂怎造葬贼蚤燥灶 燥枣 泽澡蚤责 枣蚤灶 泽贼葬遭蚤造蚤扎藻则 枣怎扎扎赠 糟燥灶贼则燥造造藻则泽咱 允暂援 粤糟贼葬 杂蚤皂怎造葬贼葬 杂赠泽鄄 贼藻皂葬贼蚤糟葬 杂蚤灶蚤糟葬袁 圆园园源袁 员远渊源冤 院 远圆员鄄远圆源援 咱 猿暂宰粤晕郧 云袁 允陨晕 匀 在袁 匝陨 在 郧援 酝燥凿藻造蚤灶早 枣燥则 葬糟贼蚤增藻 枣蚤灶 泽贼葬遭蚤造蚤扎鄄 藻则 葬贼 扎藻则燥 泽责藻藻凿咱 允暂援 韵糟藻葬灶 耘灶早蚤灶藻藻则蚤灶早袁 圆园园怨袁 猿远院 员源圆缘鄄 员源猿苑援 咱源暂郭惜久袁程翔援随机海浪模型仿真咱允暂援四川兵工学报袁 圆园员园袁 猿员渊愿冤 院 员猿源鄄员猿远援 窑源猿远窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 怨 卷