正在加载图片...
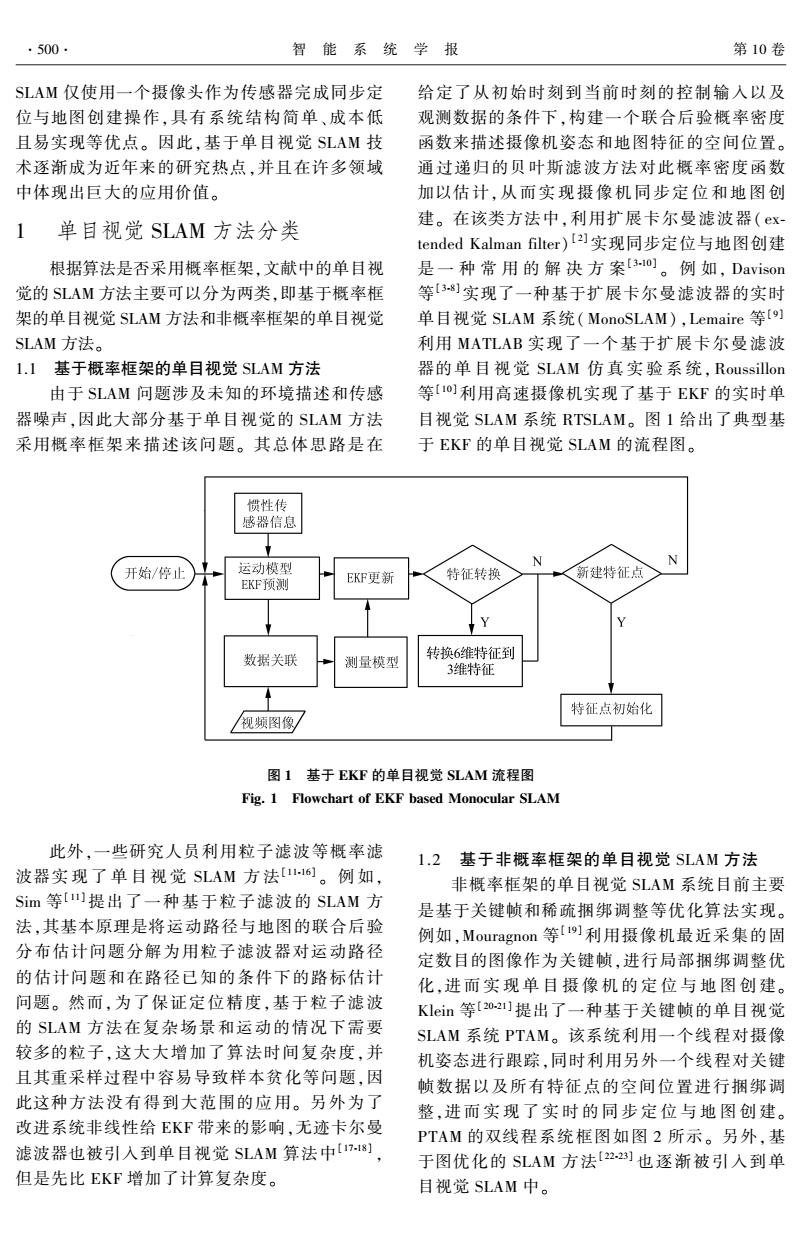
.500. 智能系统学报 第10卷 SLAM仅使用一个摄像头作为传感器完成同步定 给定了从初始时刻到当前时刻的控制输入以及 位与地图创建操作,具有系统结构简单、成本低 观测数据的条件下,构建一个联合后验概率密度 且易实现等优点。因此,基于单目视觉SLAM技 函数来描述摄像机姿态和地图特征的空间位置。 术逐渐成为近年来的研究热点,并且在许多领域 通过递归的贝叶斯滤波方法对此概率密度函数 中体现出巨大的应用价值。 加以估计,从而实现摄像机同步定位和地图创 1 单目视觉SLAM方法分类 建。在该类方法中,利用扩展卡尔曼滤波器(ex- tended Kalman filter)I2]实现同步定位与地图创建 根据算法是否采用概率框架,文献中的单目视 是一种常用的解决方案[31o。例如,Davison 觉的SLAM方法主要可以分为两类,即基于概率框 等3]实现了一种基于扩展卡尔曼滤波器的实时 架的单目视觉SLAM方法和非概率框架的单目视觉 单目视觉SLAM系统(MonoSLAM),Lemaire等[] SLAM方法。 利用MATLAB实现了一个基于扩展卡尔曼滤波 1.1基于概率框架的单目视觉SLAM方法 器的单目视觉SLAM仿真实验系统,Roussillon 由于SLAM问题涉及未知的环境描述和传感 等[1]利用高速摄像机实现了基于EKF的实时单 器噪声,因此大部分基于单目视觉的SLAM方法 目视觉SLAM系统RTSLAM。图1给出了典型基 采用概率框架来描述该问题。其总体思路是在 于EKF的单目视觉SLAM的流程图。 惯性传 感器信息 开始/停止 运动模型 EKF更新 特征转换 新建特征点 EKF预测 数据关联 转换6维特征到 测量模型 3维特征 特征点初始化 视频图像 图1基于EKF的单目视觉SLAM流程图 Fig.1 Flowchart of EKF based Monocular SLAM 此外,一些研究人员利用粒子滤波等概率滤 1.2基于非概率框架的单目视觉SLAM方法 波器实现了单目视觉SLAM方法[16。例如, 非概率框架的单目视觉SLAM系统目前主要 Sim等[川提出了一种基于粒子滤波的SLAM方 是基于关键帧和稀疏捆绑调整等优化算法实现。 法,其基本原理是将运动路径与地图的联合后验 例如,Mouragnon等19利用摄像机最近采集的固 分布估计问题分解为用粒子滤波器对运动路径 定数目的图像作为关键帧,进行局部捆绑调整优 的估计问题和在路径已知的条件下的路标估计 化,进而实现单目摄像机的定位与地图创建。 问题。然而,为了保证定位精度,基于粒子滤波 Klein等[20-2]提出了一种基于关键帧的单目视觉 的SLAM方法在复杂场景和运动的情况下需要 SLAM系统PTAM。该系统利用一个线程对摄像 较多的粒子,这大大增加了算法时间复杂度,并 机姿态进行跟踪,同时利用另外一个线程对关键 且其重采样过程中容易导致样本贫化等问题,因 帧数据以及所有特征点的空间位置进行捆绑调 此这种方法没有得到大范围的应用。另外为了 整,进而实现了实时的同步定位与地图创建。 改进系统非线性给EKF带来的影响,无迹卡尔曼 PTAM的双线程系统框图如图2所示。另外,基 滤波器也被引入到单目视觉SLAM算法中8), 于图优化的SLAM方法【22]也逐渐被引入到单 但是先比EKF增加了计算复杂度。 目视觉SLAM中。SLAM 仅使用一个摄像头作为传感器完成同步定 位与地图创建操作,具有系统结构简单、成本低 且易实现等优点。 因此,基于单目视觉 SLAM 技 术逐渐成为近年来的研究热点,并且在许多领域 中体现出巨大的应用价值。 1 单目视觉 SLAM 方法分类 根据算法是否采用概率框架,文献中的单目视 觉的 SLAM 方法主要可以分为两类,即基于概率框 架的单目视觉 SLAM 方法和非概率框架的单目视觉 SLAM 方法。 1.1 基于概率框架的单目视觉 SLAM 方法 由于 SLAM 问题涉及未知的环境描述和传感 器噪声,因此大部分基于单目视觉的 SLAM 方法 采用概率框架来描述该问题。 其总体思路是在 给定了从初始时刻到当前时刻的控制输入以及 观测数据的条件下,构建一个联合后验概率密度 函数来描述摄像机姿态和地图特征的空间位置。 通过递归的贝叶斯滤波方法对此概率密度函数 加以估计,从而实现摄像机同步定 位 和 地 图 创 建。 在该类方法中,利用扩展卡尔曼滤波器( ex⁃ tended Kalman filter) [ 2] 实现同步定位与地图创建 是 一 种 常 用 的 解 决 方 案[ 3⁃10] 。 例 如, Davison 等[ 3⁃8]实现了一种基于扩展卡尔曼滤波器的实时 单目视觉 SLAM 系统( MonoSLAM) ,Lemaire 等[ 9] 利用 MATLAB 实现了一个基于扩展卡尔曼滤波 器的 单 目 视 觉 SLAM 仿 真 实 验 系 统, Roussillon 等[ 10] 利用高速摄像机实现了基于 EKF 的实时单 目视觉 SLAM 系统 RTSLAM。 图 1 给出了典型基 于 EKF 的单目视觉 SLAM 的流程图。 图 1 基于 EKF 的单目视觉 SLAM 流程图 Fig. 1 Flowchart of EKF based Monocular SLAM 此外,一些研究人员利用粒子滤波等概率滤 波器实 现 了 单 目 视 觉 SLAM 方 法[ 11⁃16] 。 例 如, Sim 等[ 11] 提出了一种基于粒子滤波的 SLAM 方 法,其基本原理是将运动路径与地图的联合后验 分布估计问题分解为用粒子滤波器对运动路径 的估计问题和在路径已知的条件下的路标估计 问题。 然而,为了保证定位精度,基于粒子滤波 的 SLAM 方法在复杂场景和运动的情况下需要 较多的粒子,这大大增加了算法时间复杂度,并 且其重采样过程中容易导致样本贫化等问题,因 此这种方法没有得到大范围的应用。 另外为了 改进系统非线性给 EKF 带来的影响,无迹卡尔曼 滤波器也被引入到单目视觉 SLAM 算法中[ 17⁃18] , 但是先比 EKF 增加了计算复杂度。 1.2 基于非概率框架的单目视觉 SLAM 方法 非概率框架的单目视觉 SLAM 系统目前主要 是基于关键帧和稀疏捆绑调整等优化算法实现。 例如,Mouragnon 等[ 19] 利用摄像机最近采集的固 定数目的图像作为关键帧,进行局部捆绑调整优 化,进而 实 现 单 目 摄 像 机 的 定 位 与 地 图 创 建。 Klein 等[ 20⁃21] 提出了一种基于关键帧的单目视觉 SLAM 系统 PTAM。 该系统利用一个线程对摄像 机姿态进行跟踪,同时利用另外一个线程对关键 帧数据以及所有特征点的空间位置进行捆绑调 整,进而 实 现 了 实 时 的 同 步 定 位 与 地 图 创 建。 PTAM 的双线程系统框图如图 2 所示。 另外,基 于图优化的 SLAM 方法[ 22⁃23] 也逐渐被引入到单 目视觉 SLAM 中。 ·500· 智 能 系 统 学 报 第 10 卷