正在加载图片...
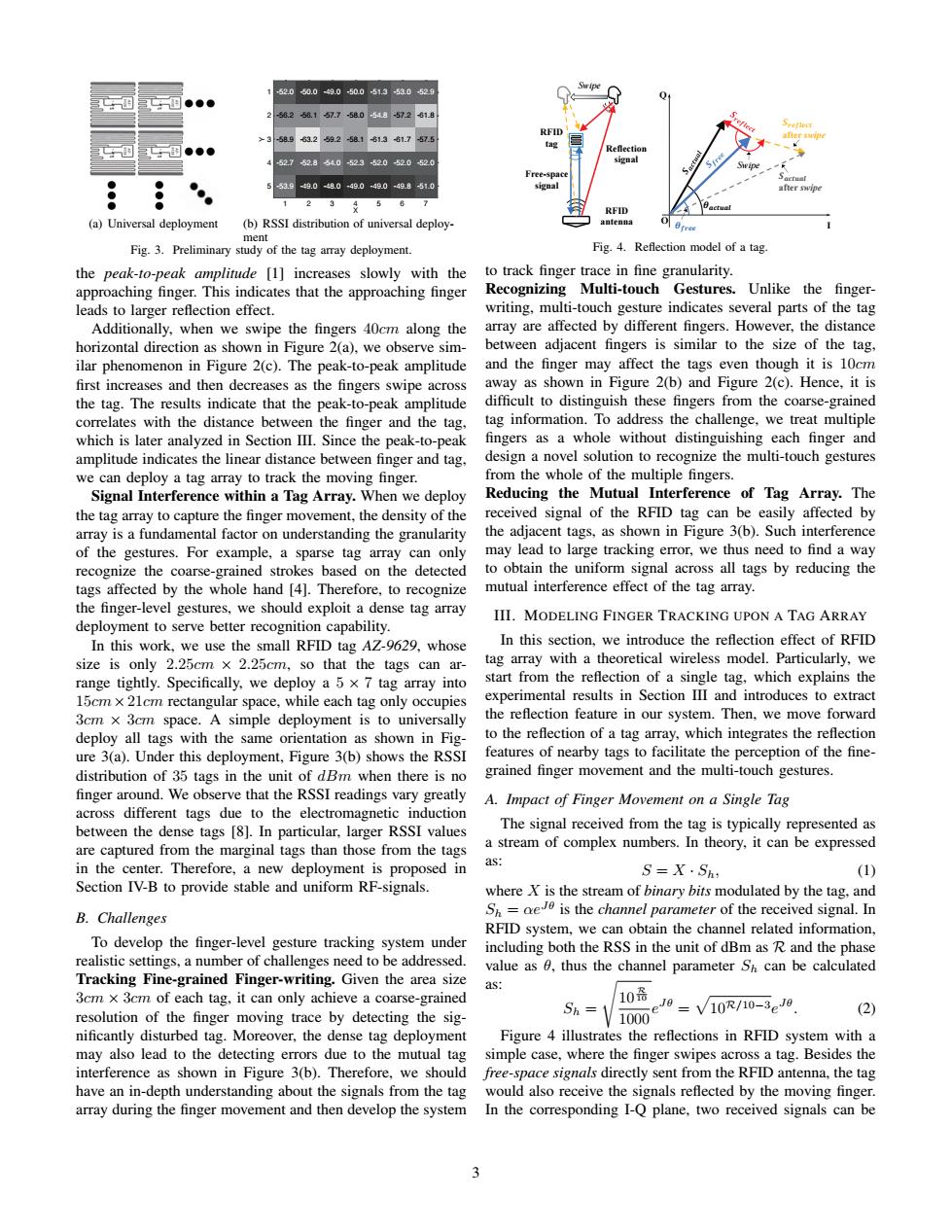
2050.09.0500513530529 256.25级.17.78054872618 >358.963.259.2-581613617575 RFID Reflection 452752854.0523520520520 s世n Free-space ● 553.9-49.048.0-490-490-49851.0 signal ● ● 23567 RFID (a)Universal deployment (b)RSSI distribution of universal deploy- antenna ment Fig.3.Preliminary study of the tag array deployment. Fig.4.Reflection model of a tag. the peak-to-peak amplitude [1 increases slowly with the to track finger trace in fine granularity. approaching finger.This indicates that the approaching finger Recognizing Multi-touch Gestures.Unlike the finger- leads to larger refection effect. writing,multi-touch gesture indicates several parts of the tag Additionally,when we swipe the fingers 40cm along the array are affected by different fingers.However,the distance horizontal direction as shown in Figure 2(a),we observe sim- between adjacent fingers is similar to the size of the tag, ilar phenomenon in Figure 2(c).The peak-to-peak amplitude and the finger may affect the tags even though it is 10cm first increases and then decreases as the fingers swipe across away as shown in Figure 2(b)and Figure 2(c).Hence,it is the tag.The results indicate that the peak-to-peak amplitude difficult to distinguish these fingers from the coarse-grained correlates with the distance between the finger and the tag, tag information.To address the challenge,we treat multiple which is later analyzed in Section III.Since the peak-to-peak fingers as a whole without distinguishing each finger and amplitude indicates the linear distance between finger and tag, design a novel solution to recognize the multi-touch gestures we can deploy a tag array to track the moving finger. from the whole of the multiple fingers. Signal Interference within a Tag Array.When we deploy Reducing the Mutual Interference of Tag Array.The the tag array to capture the finger movement,the density of the received signal of the RFID tag can be easily affected by array is a fundamental factor on understanding the granularity the adjacent tags,as shown in Figure 3(b).Such interference of the gestures.For example,a sparse tag array can only may lead to large tracking error,we thus need to find a way recognize the coarse-grained strokes based on the detected to obtain the uniform signal across all tags by reducing the tags affected by the whole hand [41.Therefore,to recognize mutual interference effect of the tag array. the finger-level gestures,we should exploit a dense tag array III.MODELING FINGER TRACKING UPON A TAG ARRAY deployment to serve better recognition capability. In this work,we use the small RFID tag AZ-9629,whose In this section,we introduce the reflection effect of RFID size is only 2.25cm x 2.25cm,so that the tags can ar- tag array with a theoretical wireless model.Particularly,we range tightly.Specifically,we deploy a 5 x 7 tag array into start from the reflection of a single tag,which explains the 15cm x 21cm rectangular space,while each tag only occupies experimental results in Section III and introduces to extract 3cm x 3cm space.A simple deployment is to universally the reflection feature in our system.Then,we move forward deploy all tags with the same orientation as shown in Fig- to the reflection of a tag array,which integrates the reflection ure 3(a).Under this deployment,Figure 3(b)shows the RSSI features of nearby tags to facilitate the perception of the fine- distribution of 35 tags in the unit of dBm when there is no grained finger movement and the multi-touch gestures. finger around.We observe that the RSSI readings vary greatly A.Impact of Finger Movement on a Single Tag across different tags due to the electromagnetic induction between the dense tags [8].In particular,larger RSSI values The signal received from the tag is typically represented as are captured from the marginal tags than those from the tags a stream of complex numbers.In theory,it can be expressed in the center.Therefore,a new deployment is proposed in as: S=X·Sh, (1) Section IV-B to provide stable and uniform RF-signals. where X is the stream of binary bits modulated by the tag,and B.Challenges Sh=ae is the channel parameter of the received signal.In RFID system,we can obtain the channel related information. To develop the finger-level gesture tracking system under including both the RSS in the unit of dBm as R and the phase realistic settings,a number of challenges need to be addressed. value as 6,thus the channel parameter Sh can be calculated Tracking Fine-grained Finger-writing.Given the area size as: 3cm x 3cm of each tag,it can only achieve a coarse-grained 10器 8=V10R/10-3eJ0 (2) resolution of the finger moving trace by detecting the sig- Sh= 1000e nificantly disturbed tag.Moreover,the dense tag deployment Figure 4 illustrates the reflections in RFID system with a may also lead to the detecting errors due to the mutual tag simple case,where the finger swipes across a tag.Besides the interference as shown in Figure 3(b).Therefore,we should free-space signals directly sent from the RFID antenna,the tag have an in-depth understanding about the signals from the tag would also receive the signals reflected by the moving finger. array during the finger movement and then develop the system In the corresponding I-Q plane,two received signals can be 3(a) Universal deployment -52.0 -56.2 -58.9 -52.7 -53.9 -50.0 -56.1 -63.2 -52.8 -49.0 -49.0 -57.7 -59.2 -54.0 -48.0 -50.0 -58.0 -58.1 -52.3 -49.0 -51.3 -54.8 -61.3 -52.0 -49.0 -53.0 -57.2 -61.7 -52.0 -49.8 -52.9 -61.8 -57.5 -52.0 -51.0 X 1 2 3 4 5 6 7 Y 1 2 3 4 5 (b) RSSI distribution of universal deployment Fig. 3. Preliminary study of the tag array deployment. the peak-to-peak amplitude [1] increases slowly with the approaching finger. This indicates that the approaching finger leads to larger reflection effect. Additionally, when we swipe the fingers 40cm along the horizontal direction as shown in Figure 2(a), we observe similar phenomenon in Figure 2(c). The peak-to-peak amplitude first increases and then decreases as the fingers swipe across the tag. The results indicate that the peak-to-peak amplitude correlates with the distance between the finger and the tag, which is later analyzed in Section III. Since the peak-to-peak amplitude indicates the linear distance between finger and tag, we can deploy a tag array to track the moving finger. Signal Interference within a Tag Array. When we deploy the tag array to capture the finger movement, the density of the array is a fundamental factor on understanding the granularity of the gestures. For example, a sparse tag array can only recognize the coarse-grained strokes based on the detected tags affected by the whole hand [4]. Therefore, to recognize the finger-level gestures, we should exploit a dense tag array deployment to serve better recognition capability. In this work, we use the small RFID tag AZ-9629, whose size is only 2.25cm × 2.25cm, so that the tags can arrange tightly. Specifically, we deploy a 5 × 7 tag array into 15cm×21cm rectangular space, while each tag only occupies 3cm × 3cm space. A simple deployment is to universally deploy all tags with the same orientation as shown in Figure 3(a). Under this deployment, Figure 3(b) shows the RSSI distribution of 35 tags in the unit of dBm when there is no finger around. We observe that the RSSI readings vary greatly across different tags due to the electromagnetic induction between the dense tags [8]. In particular, larger RSSI values are captured from the marginal tags than those from the tags in the center. Therefore, a new deployment is proposed in Section IV-B to provide stable and uniform RF-signals. B. Challenges To develop the finger-level gesture tracking system under realistic settings, a number of challenges need to be addressed. Tracking Fine-grained Finger-writing. Given the area size 3cm × 3cm of each tag, it can only achieve a coarse-grained resolution of the finger moving trace by detecting the significantly disturbed tag. Moreover, the dense tag deployment may also lead to the detecting errors due to the mutual tag interference as shown in Figure 3(b). Therefore, we should have an in-depth understanding about the signals from the tag array during the finger movement and then develop the system I O Q RFID antenna RFID tag Reflection signal Free-space signal !"#$%"& !'()) Swipe *()'&)#$ after swipe *"#$%"& after swipe Swipe Fig. 4. Reflection model of a tag. to track finger trace in fine granularity. Recognizing Multi-touch Gestures. Unlike the fingerwriting, multi-touch gesture indicates several parts of the tag array are affected by different fingers. However, the distance between adjacent fingers is similar to the size of the tag, and the finger may affect the tags even though it is 10cm away as shown in Figure 2(b) and Figure 2(c). Hence, it is difficult to distinguish these fingers from the coarse-grained tag information. To address the challenge, we treat multiple fingers as a whole without distinguishing each finger and design a novel solution to recognize the multi-touch gestures from the whole of the multiple fingers. Reducing the Mutual Interference of Tag Array. The received signal of the RFID tag can be easily affected by the adjacent tags, as shown in Figure 3(b). Such interference may lead to large tracking error, we thus need to find a way to obtain the uniform signal across all tags by reducing the mutual interference effect of the tag array. III. MODELING FINGER TRACKING UPON A TAG ARRAY In this section, we introduce the reflection effect of RFID tag array with a theoretical wireless model. Particularly, we start from the reflection of a single tag, which explains the experimental results in Section III and introduces to extract the reflection feature in our system. Then, we move forward to the reflection of a tag array, which integrates the reflection features of nearby tags to facilitate the perception of the finegrained finger movement and the multi-touch gestures. A. Impact of Finger Movement on a Single Tag The signal received from the tag is typically represented as a stream of complex numbers. In theory, it can be expressed as: S = X · Sh, (1) where X is the stream of binary bits modulated by the tag, and Sh = αeJθ is the channel parameter of the received signal. In RFID system, we can obtain the channel related information, including both the RSS in the unit of dBm as R and the phase value as θ, thus the channel parameter Sh can be calculated as: Sh = s 10 R 10 1000 e Jθ = p 10R/10−3e Jθ . (2) Figure 4 illustrates the reflections in RFID system with a simple case, where the finger swipes across a tag. Besides the free-space signals directly sent from the RFID antenna, the tag would also receive the signals reflected by the moving finger. In the corresponding I-Q plane, two received signals can be 3