正在加载图片...
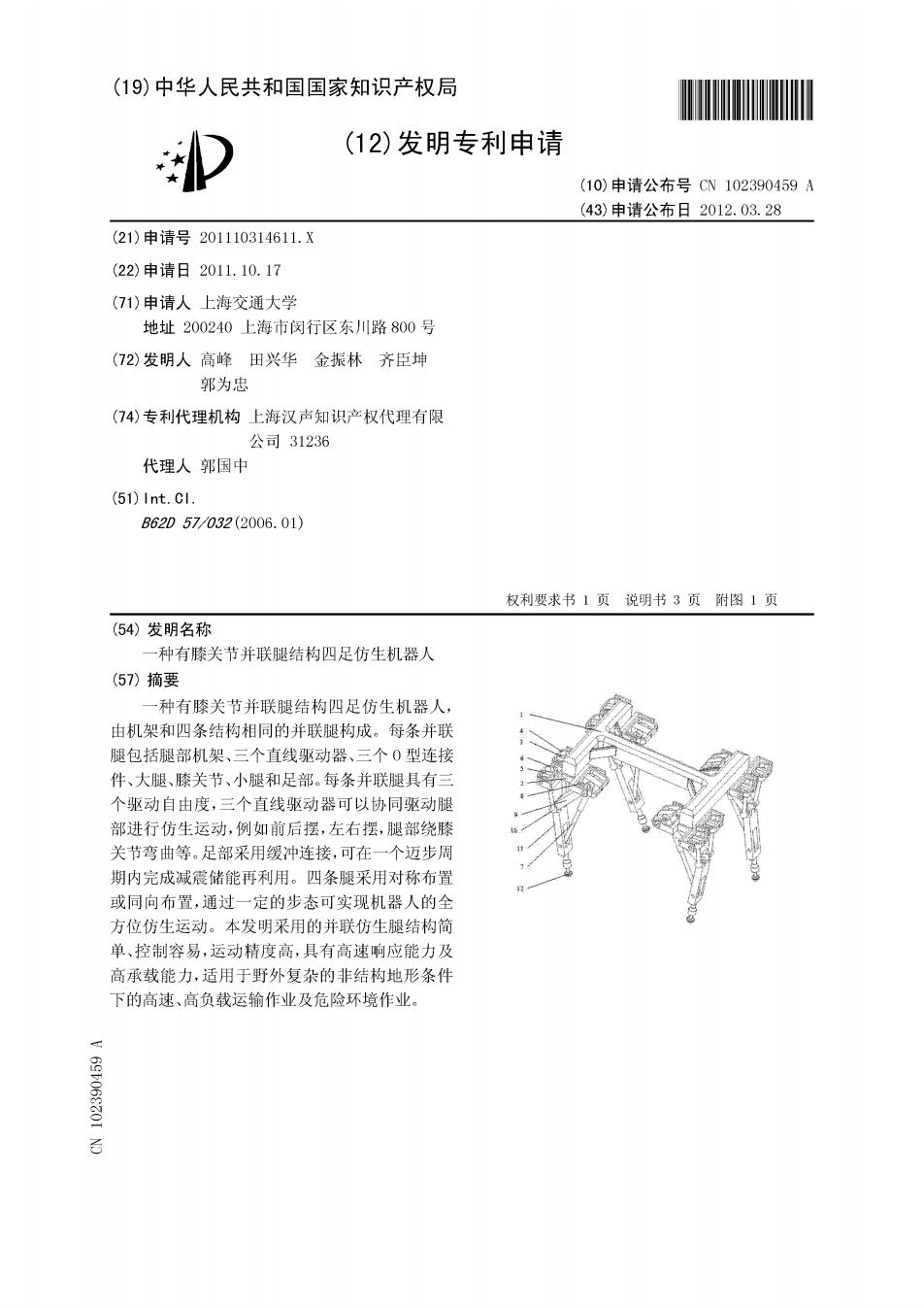
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN102390459A (43)申请公布日2012.03.28 (21)申请号201110314611.X (22)申请日2011.10.17 (71)申请人上海交通大学 地址200240上海市闵行区东川路800号 (72)发明人高峰田兴华金振林齐臣坤 郭为忠 (74)专利代理机构上海汉声知识产权代理有限 公司31236 代理人郭国中 (51)1nt.cl. B62D57032(2006.01) 权利要求书1页说明书3页附图1页 (54)发明名称 一种有膝关节并联腿结构四足仿生机器人 (57)摘要 一种有膝关节并联腿结构四足仿生机器人, 由机架和四条结构相同的并联腿构成。每条并联 腿包括腿部机架、三个直线驱动器、三个0型连接 件、大腿、膝关节、小腿和足部。每条并联腿具有三 个驱动自由度,三个直线驱动器可以协同驱动腿 部进行仿生运动,例如前后摆,左右摆,腿部绕膝 关节弯曲等。足部采用缓冲连接,可在一个迈步周 期内完成减震储能再利用。四条腿采用对称布置 或同向布置,通过一定的步态可实现机器人的全 方位仿生运动。本发明采用的并联仿生腿结构简 单、控制容易,运动精度高,具有高速响应能力及 高承载能力,适用于野外复杂的非结构地形条件 下的高速、高负载运输作业及危险环境作业。 635069301